猫除け装置その2
はじめに
前述の芝生散水装置+猫センサーに続き、駐車場や勝手口まわりの通路をカバーするため電池式猫除け装置を製作しました。
センサは同じ秋月電子通商の焦電センサPaPIRs(VZ) (通販コードM-09751)を使っています。
最初はポンプに自動車用のギア式ポンプを使いましたが、12Vなのに吐出量がいまいちでした。
そこで自作の遠心ポンプに変更し、改良を続けてきました。
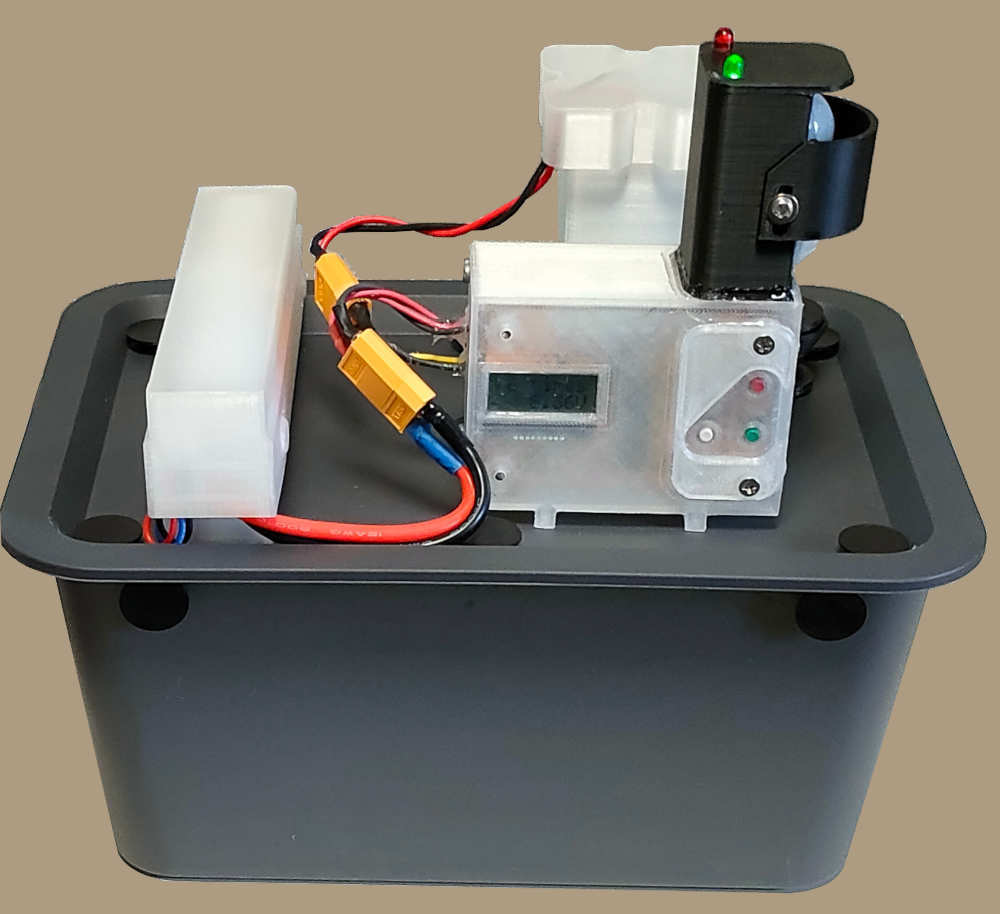
現在の最新版が写真の装置です。
サイズはおおよそ26cm✕18cm✕23cmとコンパクトになりました。
センサは同じ秋月電子通商の焦電センサPaPIRs(VZ) (通販コードM-09751)を使っています。
最初はポンプに自動車用のギア式ポンプを使いましたが、12Vなのに吐出量がいまいちでした。
そこで自作の遠心ポンプに変更し、改良を続けてきました。
現在の最新版が写真の装置です。
サイズはおおよそ26cm✕18cm✕23cmとコンパクトになりました。

猫は水しぶきがかかるだけでびっくりして逃げるため、1回の噴射は0.3秒程度の短時間で十分です。
その場合、下部タンクの水3Lで30回以上噴射できます。
テストモード(マニュアル操作)で0.3秒の噴射(3回)をさせた時の動画を添付します。
その場合、下部タンクの水3Lで30回以上噴射できます。
テストモード(マニュアル操作)で0.3秒の噴射(3回)をさせた時の動画を添付します。

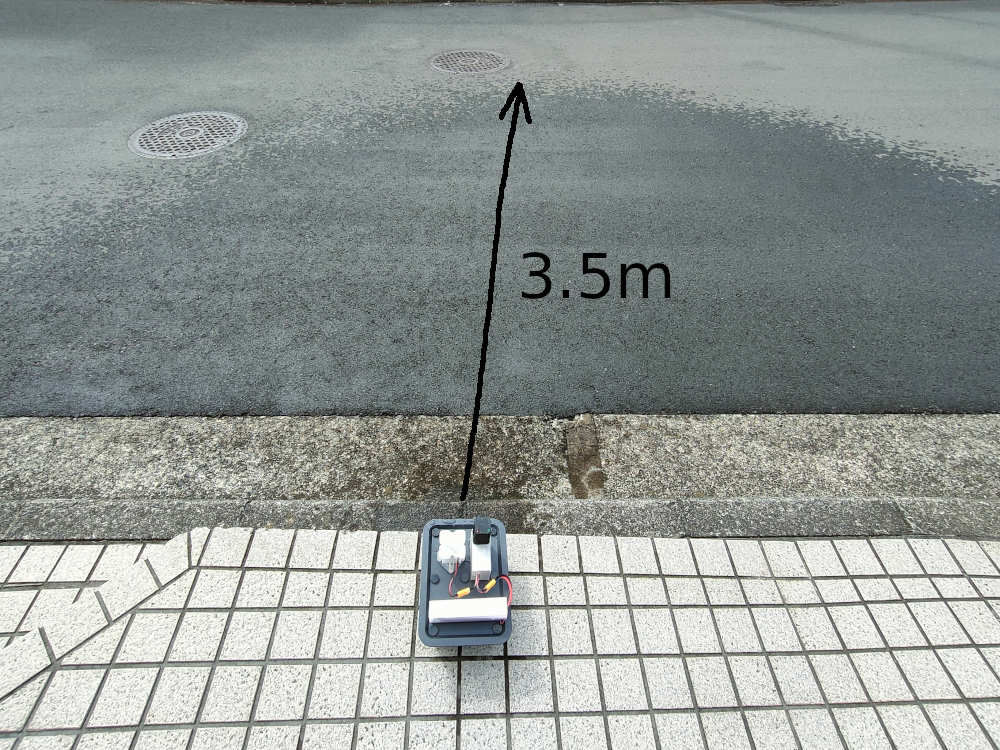
次の写真は散水範囲をしらべるため、道路に向かって0.3秒の噴射✕20回で路面を濡らした写真です。
風が吹いていたので少し右に寄りましたが、散水範囲は半径3.5m、140度くらいの扇型でかなり均一に散布できています。
このときの電池電圧は8.2V、ノズルは仰角45度のものを使っています。
センサーの検知範囲は半径3m、140度くらいなので検知範囲は散水範囲より少し内側でちょうどよい感じになりました。
風が吹いていたので少し右に寄りましたが、散水範囲は半径3.5m、140度くらいの扇型でかなり均一に散布できています。
このときの電池電圧は8.2V、ノズルは仰角45度のものを使っています。
センサーの検知範囲は半径3m、140度くらいなので検知範囲は散水範囲より少し内側でちょうどよい感じになりました。
電池
電池は落ち葉掃除機で使ったのと同じ、充電式で大電流が流せるラジコン用リチウムイオン電池(2セル、7.4V)にしました。
メイン端子は手持ちの大電流用コネクタXT60に替えています。
***追記***
最終的にもともと付いていたディーンズT型コネクタに戻しました。
==>コネクタの接触不良と対策を参照
もう一方の3端子コネクタはバランス充電で使用する端子です。
充電器はLiPo電池のバランス充電対応のものを使っています。
メイン端子は手持ちの大電流用コネクタXT60に替えています。
***追記***
最終的にもともと付いていたディーンズT型コネクタに戻しました。
==>コネクタの接触不良と対策を参照
もう一方の3端子コネクタはバランス充電で使用する端子です。
充電器はLiPo電池のバランス充電対応のものを使っています。

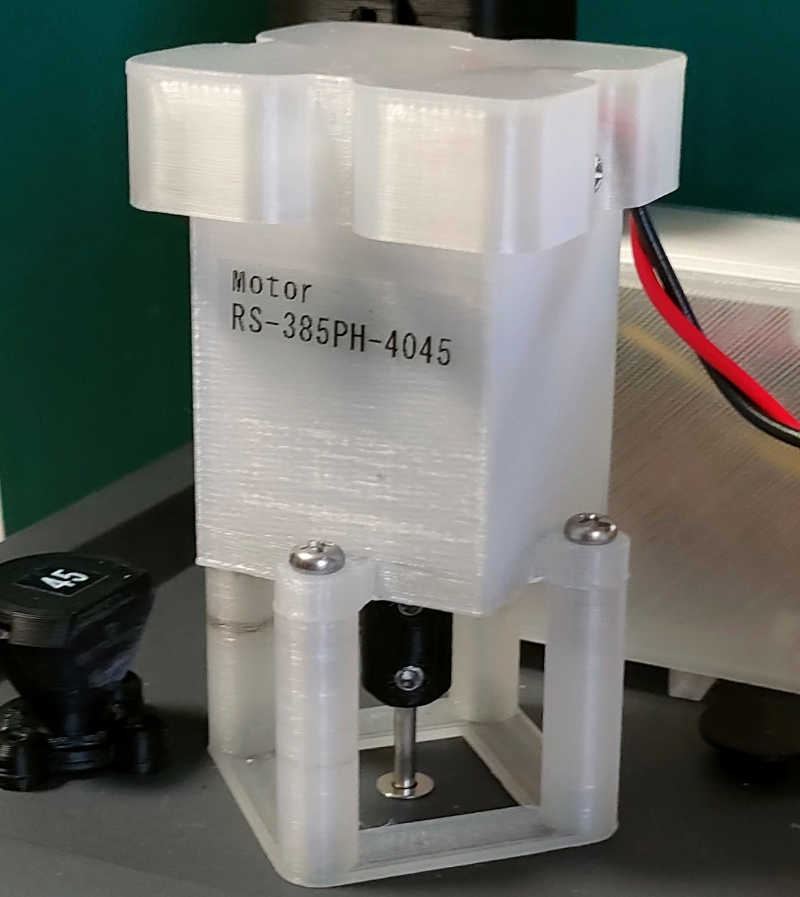
モーター
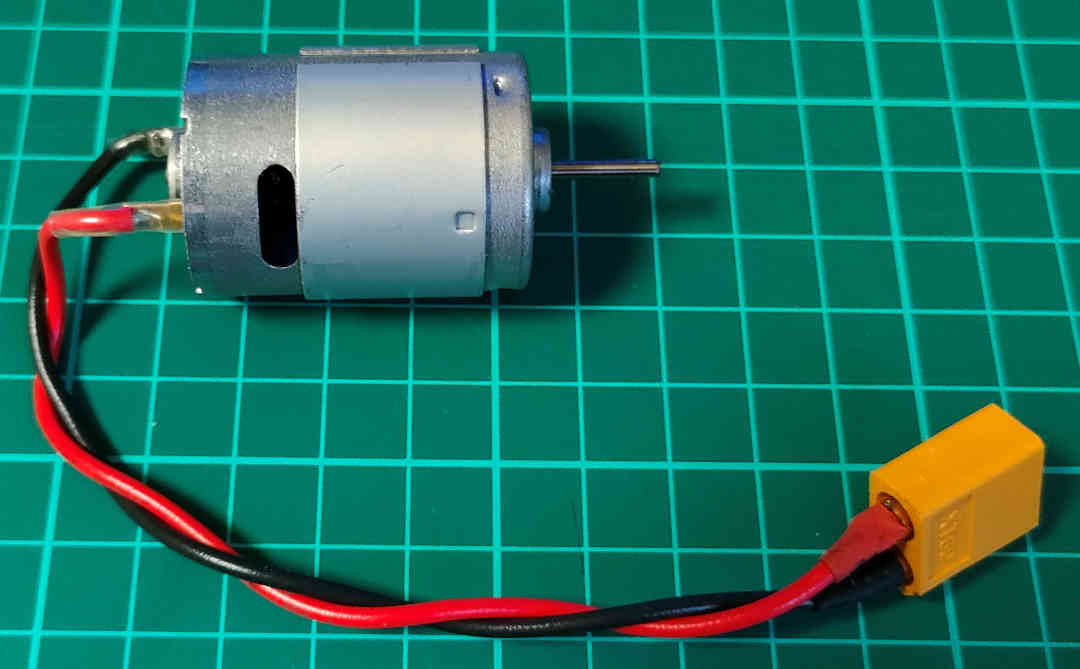
モーターは秋月電子通商で扱っているRS-385PH-4045を使いました。
カーボンブラシで5極、3.0~9V仕様、小型の割にはハイパワーで1個200円(2022/8現在)とめっちゃ安価です。
ちなみに同形状のマブチのRS-380PH-4045も使ってみましたが、1個千円以上するしパワーも若干少なく感じました。
なおマブチのモーターには取付用のM2.6の小ねじが付属していますが、秋月のモーターにはついていないのでM2.6長さ5mmまたは6mmを2本別途入手する必要があります。
カーボンブラシで5極、3.0~9V仕様、小型の割にはハイパワーで1個200円(2022/8現在)とめっちゃ安価です。
ちなみに同形状のマブチのRS-380PH-4045も使ってみましたが、1個千円以上するしパワーも若干少なく感じました。
なおマブチのモーターには取付用のM2.6の小ねじが付属していますが、秋月のモーターにはついていないのでM2.6長さ5mmまたは6mmを2本別途入手する必要があります。
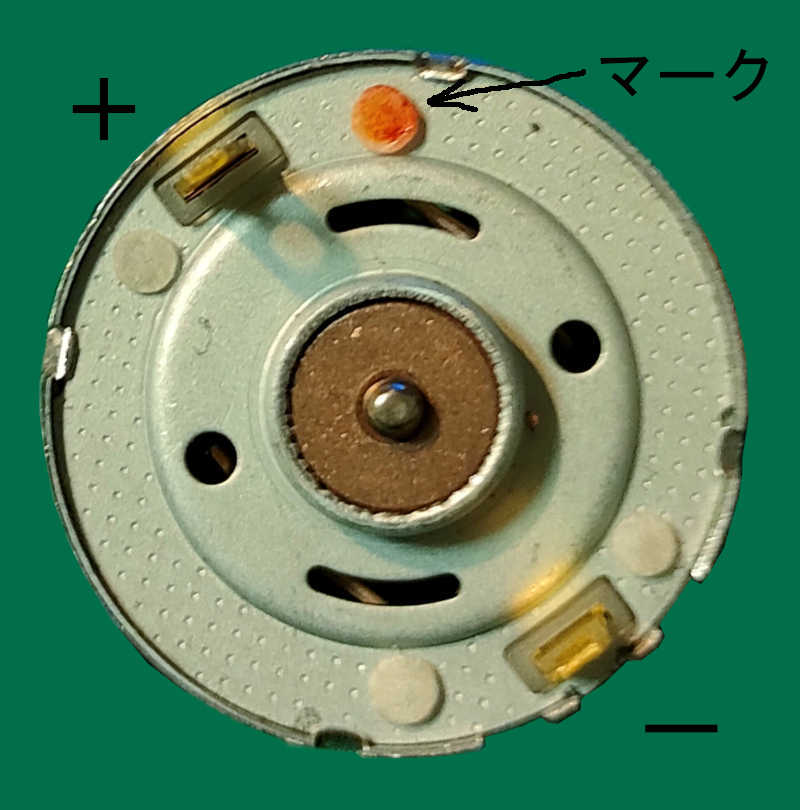
モーターの赤いマークに近い端子が電池の+側に接続されるようコネクタを半田付けしました。
回転方向は出力軸側から見て反時計回りになるのでそれに合わせてポンプ部を設計しました。
接続を間違えて逆回転になるとポンプは正常に動作しません。
モーターは雨除けのケースに収納し、M2.6のネジでケースに固定しています。
当初モーターを水タンクの蓋に直接載せていましたが、軸穴の隙間から上がってくる湿気で軸が錆びて回らなくなってしまいました。
そこで部品を足して上に持ち上げ、蓋に開けた軸穴から離しました。
遠心ポンプ
羽根車とケーシングは水に浸かっている必要があるので、水タンクの底面近くまで下げています。
ポンプ部の3Dプリントデータをまとめてzip圧縮したものを添付します。
Pump_STL.zip
これらはすべてサポート材無し、充填率100%、ブリム付で3Dプリントしました。
ポンプ部の3Dプリントデータをまとめてzip圧縮したものを添付します。
Pump_STL.zip
これらはすべてサポート材無し、充填率100%、ブリム付で3Dプリントしました。
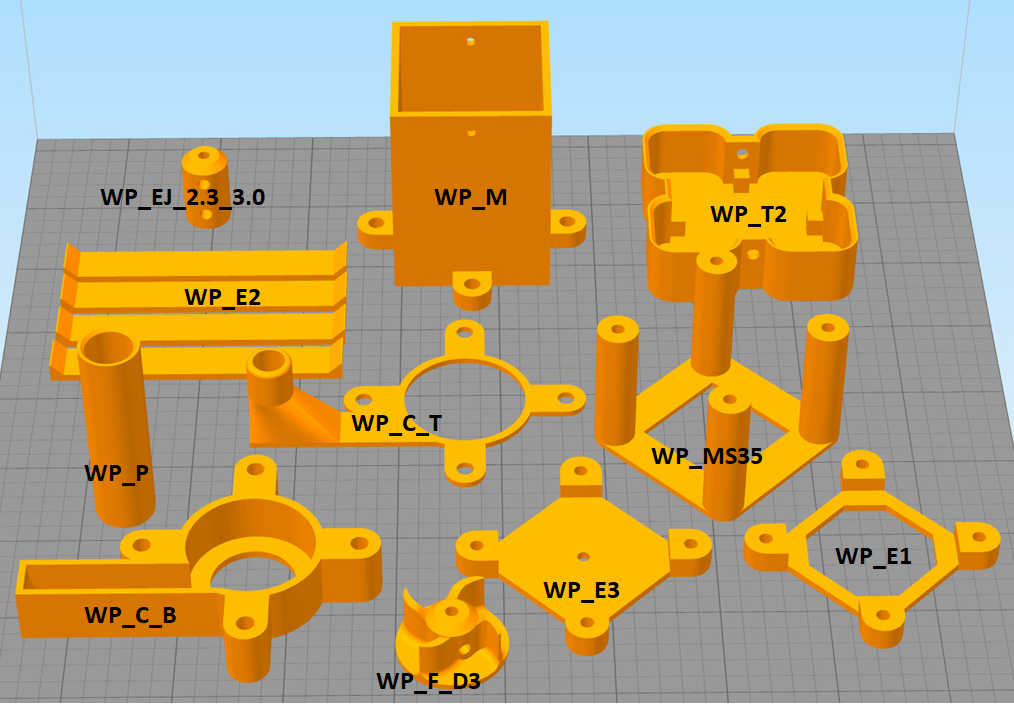
Pump_STL.zipに入れたSTLデータの形状と後加工(穴の仕上げ/タップ加工、接着)は以下の通りです。
接着には樹脂材料に合った溶剤系の接着剤を使って接着しました。
【水タンクの蓋の上に付く部品】
WP_M : 上部の2か所をM3のタップ加工、下部の4ヵ所をΦ4.1のドリル加工をします。
M2.6長さ6mmのネジでモーターを取り付けます。
WP_T2 : 2ヵ所をΦ3.1のドリル加工をします。
モーターを取り付けたWP_Mの上部にM3ネジで取りつけます。
WP_MS35 : 上部、下部のそれぞれ4か所からM4タップ加工します。
モーターを取り付けたWP_MをM4長さ10~15mmのネジで取りつけます。
WP_EJ_2.3_3.0 : 止めネジ用の穴を2ヵ所M4加工し、モーター軸が入る側はΦ2.4、逆側はΦ3.1でそれぞれ中央まで座ぐります。
モーター軸とΦ3.0mm長さ115mmステンレス棒を差し込んでM4長さ5mm六角穴付き止めネジで止めます。
【水タンクの蓋の下に付く部品】
WP_E1 : 4ヵ所をΦ4.0のドリル加工をします。
WP_E3 : 4ヵ所をM4タップ加工、中央の軸穴はΦ3.1のドリル加工をします。
WP_E2 : 同じものを4本3Dプリントし、両端にWP_E1とWP_E3を接着します。
WP_C_B、WP_C_T : WP_C_BとWP_C_Tを接着し、4ヵ所をΦ4.0ドリル加工をします。
WP_F_D3 : 止めネジ用の穴をM4加工し、ステンレス棒が入る穴はΦ3.1のドリル加工をします。
ステンレス棒を差し込んでM4長さ5mm六角穴付き止めネジで止めます。
WP_P : WP_C_Tのパイプ部及びノズルのパイプ部との嵌め合わせ具合を確認し、きつければやすりがけで調整します。
上記部品をM4ステンレスネジ 長さ22~25mm✕4本、長さ10~15mm✕4本で写真のように組み立てます。
WP_E1 : 4ヵ所をΦ4.0のドリル加工をします。
WP_E3 : 4ヵ所をM4タップ加工、中央の軸穴はΦ3.1のドリル加工をします。
WP_E2 : 同じものを4本3Dプリントし、両端にWP_E1とWP_E3を接着します。
WP_C_B、WP_C_T : WP_C_BとWP_C_Tを接着し、4ヵ所をΦ4.0ドリル加工をします。
WP_F_D3 : 止めネジ用の穴をM4加工し、ステンレス棒が入る穴はΦ3.1のドリル加工をします。
ステンレス棒を差し込んでM4長さ5mm六角穴付き止めネジで止めます。
WP_P : WP_C_Tのパイプ部及びノズルのパイプ部との嵌め合わせ具合を確認し、きつければやすりがけで調整します。
上記部品をM4ステンレスネジ 長さ22~25mm✕4本、長さ10~15mm✕4本で写真のように組み立てます。
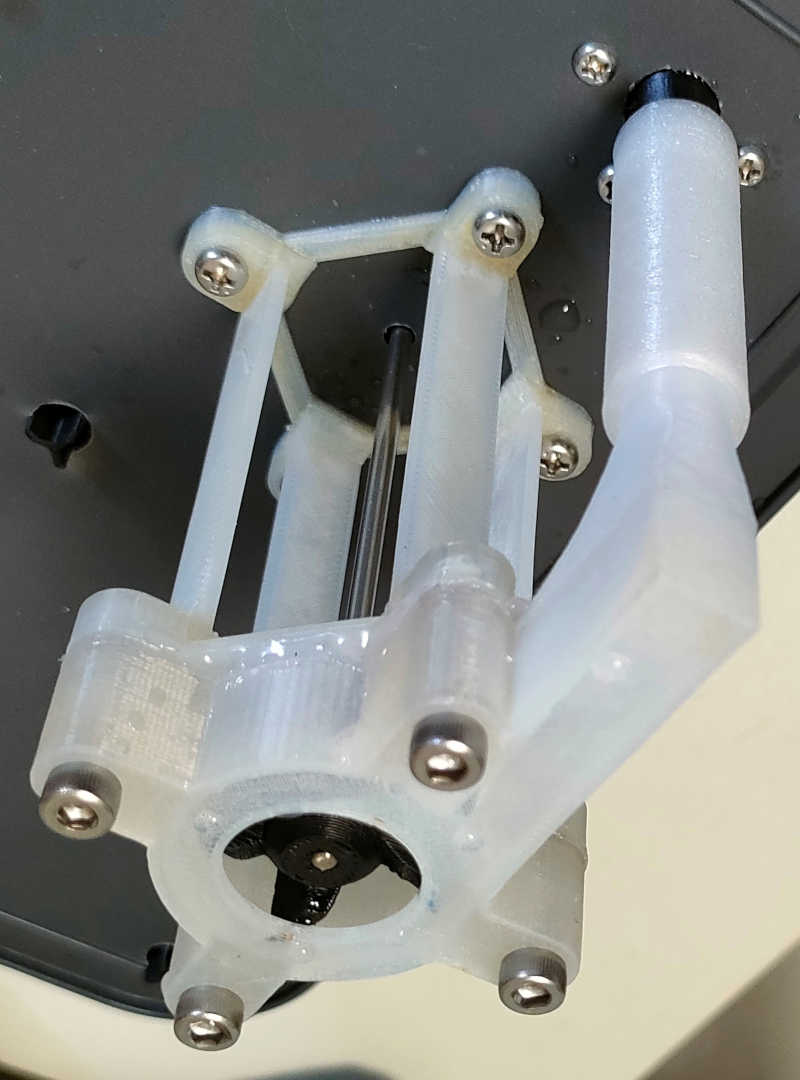
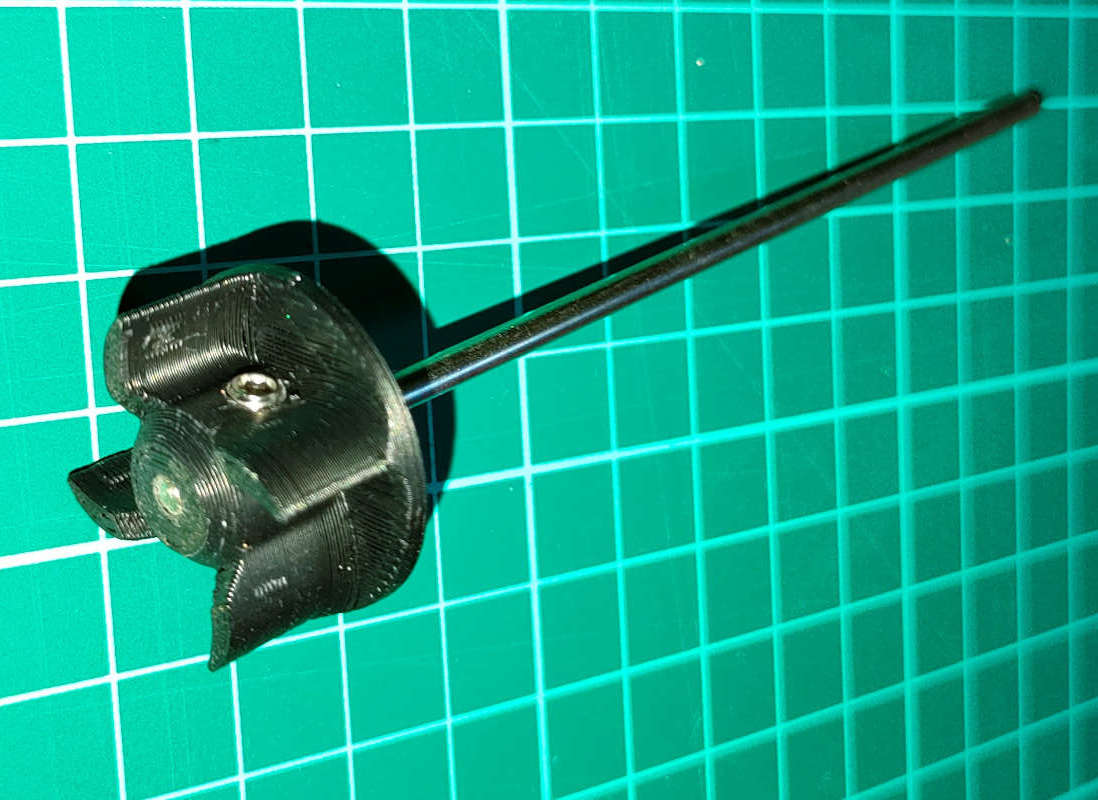
羽根車は直径3mm 長さ115mmのステンレス棒でモーターと接続しました。
羽根車とジョイントは3Dプリント部品(ABS)なので止めネジを強く締めるとネジ溝が壊れます。
そのため止めネジは軸に対して太目のM4で長さ5mm(ステンレス)を使い、止めネジが当たる部分のステンレス棒とモーター軸を0.3~0.5mmほどやすりで削って平面にし、滑りにくくしています。
回路ケース
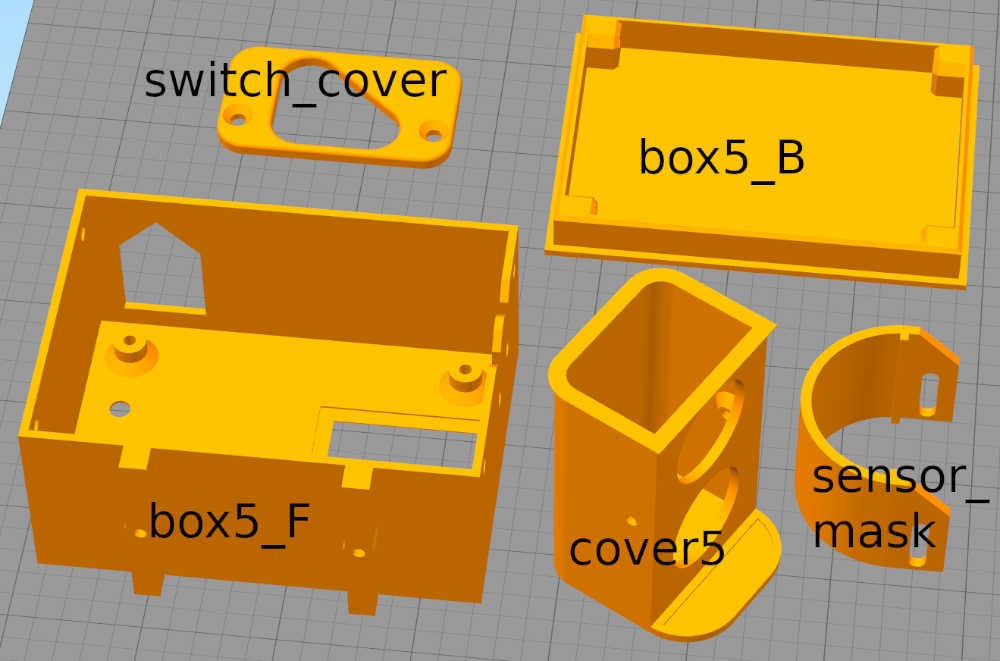
制御回路とセンサーも3Dプリントしたケースに入れました。
3Dプリントデータをまとめてzip圧縮したものを添付します。
Circuit_box_STL.zip
すべてブリム付、cover5はサポート材付、その他はサポート材無しで3Dプリントしました。
box5_Fは底面2ヵ所、前面4ヵ所をM3タップ加工、側面4ヵ所をΦ3.1のドリル加工をします。
液晶ディスプレイ用の窓には内側に0.3~0.5mm厚の透明プラ版16mm✕33mmを瞬間接着剤で張り付けました。
switch_coverの底面には透明なビニール袋から切り取った柔らかいシートを瞬間接着剤で張り付けました。
それをステンレスのM3皿ネジ長さ15mm 2本でbox5_Fに取りつけました。
cover5は左右の2ヵ所、box5_Bは4ヵ所 M3タップ加工します。
上部LED用の2つの穴をΦ5.0ドリルで仕上げ加工し、配線+コネクタを付けた直径5mmの赤と緑のLEDを瞬間接着剤で接着しました。
配線+コネクタを付けた焦電センサー2個をグルーガンで接着後、cover5をbox5_Fの5角形穴の上に接着しました。
sensor_maskはステンレスのM3ネジとワッシャでcover5に取り付けました。
3Dプリントデータをまとめてzip圧縮したものを添付します。
Circuit_box_STL.zip
すべてブリム付、cover5はサポート材付、その他はサポート材無しで3Dプリントしました。
box5_Fは底面2ヵ所、前面4ヵ所をM3タップ加工、側面4ヵ所をΦ3.1のドリル加工をします。
液晶ディスプレイ用の窓には内側に0.3~0.5mm厚の透明プラ版16mm✕33mmを瞬間接着剤で張り付けました。
switch_coverの底面には透明なビニール袋から切り取った柔らかいシートを瞬間接着剤で張り付けました。
それをステンレスのM3皿ネジ長さ15mm 2本でbox5_Fに取りつけました。
cover5は左右の2ヵ所、box5_Bは4ヵ所 M3タップ加工します。
上部LED用の2つの穴をΦ5.0ドリルで仕上げ加工し、配線+コネクタを付けた直径5mmの赤と緑のLEDを瞬間接着剤で接着しました。
配線+コネクタを付けた焦電センサー2個をグルーガンで接着後、cover5をbox5_Fの5角形穴の上に接着しました。
sensor_maskはステンレスのM3ネジとワッシャでcover5に取り付けました。
水タンクと電池ケース
水タンクは百円ショップで売っていた蓋つきの角型プラケースを使いました。
名称はスクエア収納BOX(Size 26cm✕18cm✕11.5cm)です。
最初に買ったのは白だったのですが、光が結構透過するため藻が発生しました。
そこで光が透過しにくいダークグレーに変更しました。
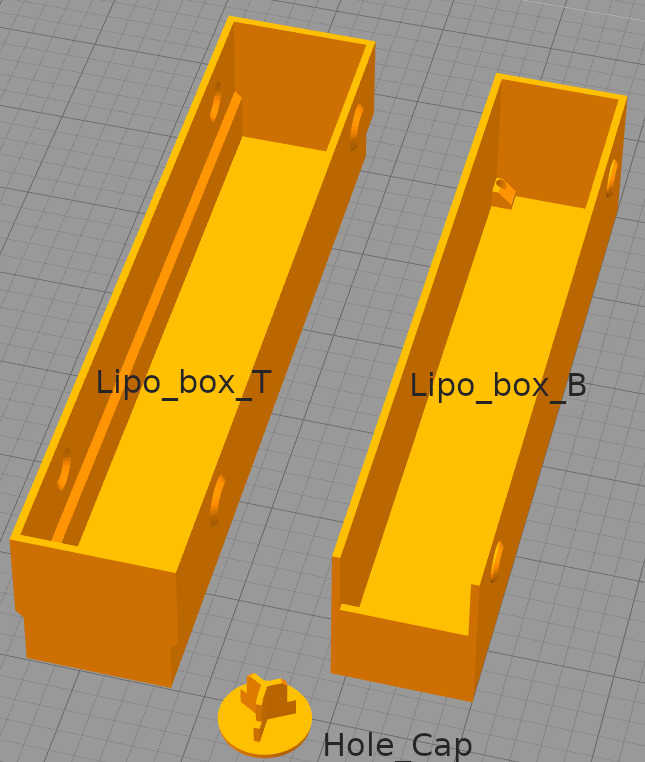
念のため、雨が蓋の上に溜まらないように開けた水抜き穴にも3Dプリントで黒いキャップをかぶせました。
キャップの3Dプリントデータ: Hole_Cap.stl
プラケースの蓋と側面上部に木工用Φ8.0mmドリルでいくつか穴をあけ、キャップを押込んで取り付けています。
水タンクの穴あけ加工寸法図 SQ_Case_Drilling.pdf
Lipoバッテリーは上下に分かれた雨除けケースに入れました。
3Dプリントデータ:Lipo_box_T.stl , Lipo_box_B.stl
Lipo_box_Bの下側4ヵ所にM3タップ加工し、M3ネジでプラケースの蓋に取り付けています。
名称はスクエア収納BOX(Size 26cm✕18cm✕11.5cm)です。
最初に買ったのは白だったのですが、光が結構透過するため藻が発生しました。
そこで光が透過しにくいダークグレーに変更しました。
念のため、雨が蓋の上に溜まらないように開けた水抜き穴にも3Dプリントで黒いキャップをかぶせました。
キャップの3Dプリントデータ: Hole_Cap.stl
プラケースの蓋と側面上部に木工用Φ8.0mmドリルでいくつか穴をあけ、キャップを押込んで取り付けています。
水タンクの穴あけ加工寸法図 SQ_Case_Drilling.pdf
Lipoバッテリーは上下に分かれた雨除けケースに入れました。
3Dプリントデータ:Lipo_box_T.stl , Lipo_box_B.stl
Lipo_box_Bの下側4ヵ所にM3タップ加工し、M3ネジでプラケースの蓋に取り付けています。
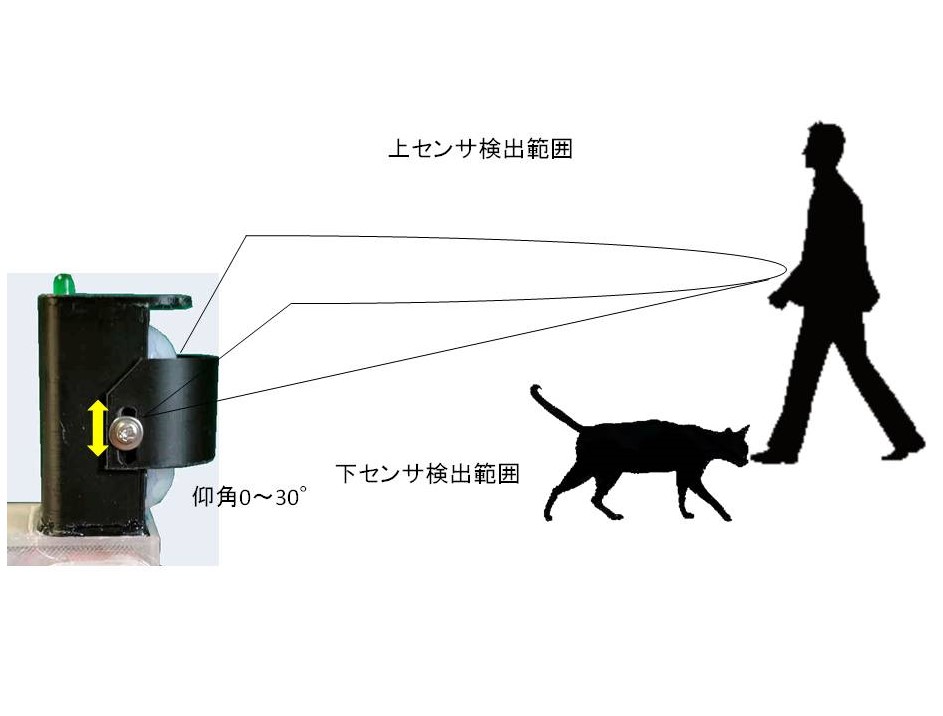
センサマスクによる検出仰角調整
2個の焦電センサで上下を分けて監視し、上のセンサが反応したとき(人が通った時)は水が噴射しないようにします。
センサの監視エリアが水平に分割されている場合、センサの設置高さを猫の体高より高くする必要があります。
初期の試作では柱を立ててその上にセンサを載せましたが、しっかりした柱を立てるのは面倒でデザインもダサくなります。
そこでセンサの受け持ち範囲の境界を仰角15度前後にして柱を省略しました。
具体策として視野を分けるためのセンサマスクを上下にスライドできるようにしました。
一番下でねじ止めすると境界は水平(仰角0度)で、上にずらすとすり鉢状のセンサ境界仰角が増し、一番上で約30度になる設計にしました。
センサで検出可能な距離や人の背丈から計算して真ん中の15度程度で使用しています。
センサの監視エリアが水平に分割されている場合、センサの設置高さを猫の体高より高くする必要があります。
初期の試作では柱を立ててその上にセンサを載せましたが、しっかりした柱を立てるのは面倒でデザインもダサくなります。
そこでセンサの受け持ち範囲の境界を仰角15度前後にして柱を省略しました。
具体策として視野を分けるためのセンサマスクを上下にスライドできるようにしました。
一番下でねじ止めすると境界は水平(仰角0度)で、上にずらすとすり鉢状のセンサ境界仰角が増し、一番上で約30度になる設計にしました。
センサで検出可能な距離や人の背丈から計算して真ん中の15度程度で使用しています。
散水ノズル
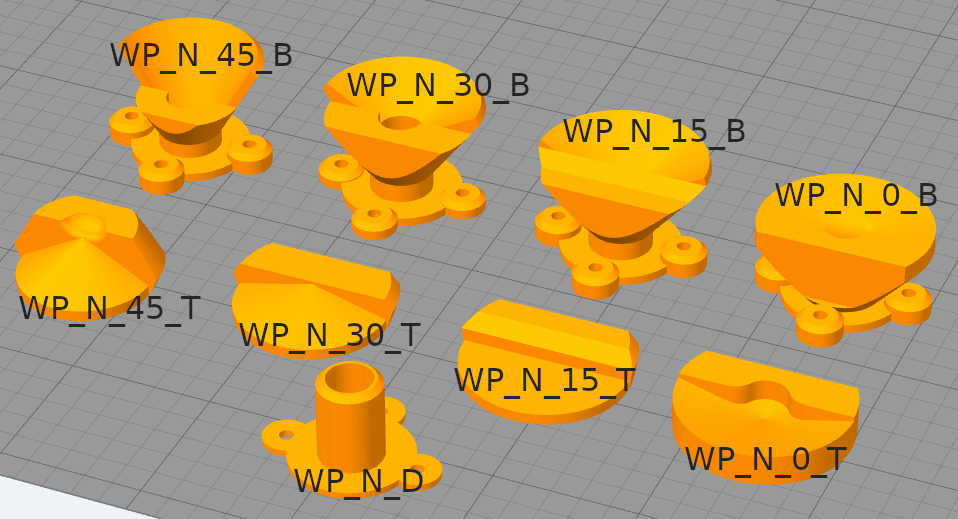
ノズルはジョーロのように多数の穴が開いたものやスリット式のもの、仰角や水平射出角が異なるものをいろいろ試しました。
3Dプリンタで作りやすいことと、思ったより散布が細かく均一だったため最終的にスリット式になりました。
サポート材無しで流路を滑らかに3Dプリントするため3分割プリントしています。
散布領域が一番広いのは仰角45度ですが、仰角30度、15度、0度も試作しました。
3Dプリント用データをまとめてzip圧縮したものを添付します。
Nozzle_STL.zip
図のWP_N_Dは各仰角のノズルに共通の部品です。
一番上のWP_N_*_TにWP_N_*_Bを接着し、その下にWP_N_Dを接着します。
ネジ穴3ヵ所にM3タップ加工してタンク容器の蓋にM3ネジで取りつけます。
3Dプリンタで作りやすいことと、思ったより散布が細かく均一だったため最終的にスリット式になりました。
サポート材無しで流路を滑らかに3Dプリントするため3分割プリントしています。
散布領域が一番広いのは仰角45度ですが、仰角30度、15度、0度も試作しました。
3Dプリント用データをまとめてzip圧縮したものを添付します。
Nozzle_STL.zip
図のWP_N_Dは各仰角のノズルに共通の部品です。
一番上のWP_N_*_TにWP_N_*_Bを接着し、その下にWP_N_Dを接着します。
ネジ穴3ヵ所にM3タップ加工してタンク容器の蓋にM3ネジで取りつけます。
回路
・参考情報として、回路図(2階層3ページ)、感光基板製作用マスクパターン、部品配置、ドリルマップ、基板寸法図を入れたpdfを添付します。
cat_spray5_circuit.pdf
抵抗やコンデンサ、MOSトランジスタは表面実装部品を使っています。(千石電商や秋月電子通商で購入)
N-MOSトランジスタ、モーター用コネクタ、電源コネクタ、電流検出抵抗の間の配線パターンには瞬間的に大きな電流が流れるので半田を盛って補強しています。
N-MOSトランジスタは大電流用で、電流検出抵抗も3225サイズを2個並列にして電流容量に余裕を持たせています。
部品実装後、透明な絶縁コーティング剤(ハヤコート)を塗って湿気対策をしています。
cat_spray5_circuit.pdf
抵抗やコンデンサ、MOSトランジスタは表面実装部品を使っています。(千石電商や秋月電子通商で購入)
N-MOSトランジスタ、モーター用コネクタ、電源コネクタ、電流検出抵抗の間の配線パターンには瞬間的に大きな電流が流れるので半田を盛って補強しています。
N-MOSトランジスタは大電流用で、電流検出抵抗も3225サイズを2個並列にして電流容量に余裕を持たせています。
部品実装後、透明な絶縁コーティング剤(ハヤコート)を塗って湿気対策をしています。
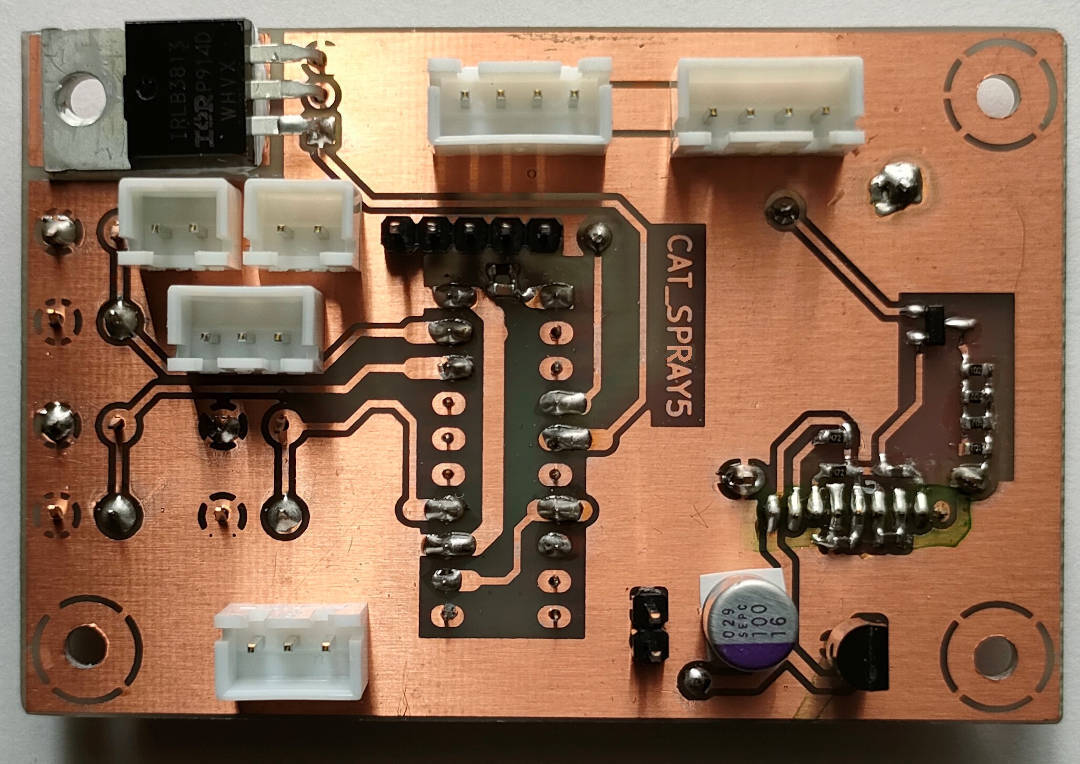
モーター用コネクタ、電源コネクタは2pinではなく4pinにして接続端子を2並列にしてケース外に配線を引出し、そこでさらに大電流用コネクタ XT60 経由でモーターと電池に接続しています。
・基板のケースを透明樹脂で作ったのでCdsセンサはケース内で明暗を検出できます。
今回は2.54mmピッチのピンヘッダ/ソケット経由で接続しましたが直はんだ付けでも問題ないです。
もし光が十分入らないケースの場合は窓を設けてCdsに光を当てる必要があります。
・基板のケースを透明樹脂で作ったのでCdsセンサはケース内で明暗を検出できます。
今回は2.54mmピッチのピンヘッダ/ソケット経由で接続しましたが直はんだ付けでも問題ないです。
もし光が十分入らないケースの場合は窓を設けてCdsに光を当てる必要があります。
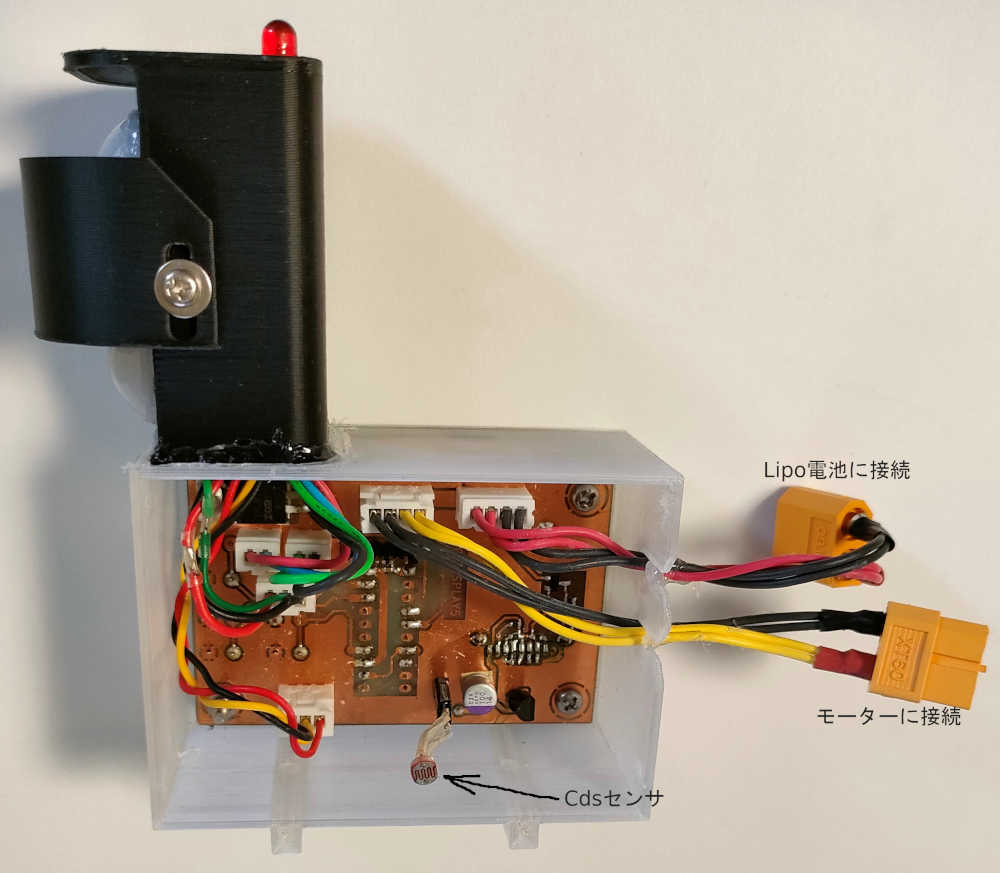
・猫監視モードで水を噴射していないときの待機電流は実測で1.15mAでした。
Lipo電池の容量4000mAhが実際は半分だとしても2か月以上電池が持つ計算になります。
ただし5Vを作る3端子レギュレータにバイポーラタイプ(78L05)を使うとmAオーダーのレギュレータ内消費電流が流れるので待機電流が大幅に増えて電池の持ちがかなり悪くなります。
そのため、レギュレータ内消費電流がμAオーダーと小さいCMOSタイプ(LP2950L-5)を使っています。
CMOSタイプでは電池を接続するときレギュレータ内浮遊容量の影響なのか5V以上の電圧が瞬間的に漏れ出るので、対策として5V側に10μFと少し大きめのコンデンサを入れています。
Lipo電池の容量4000mAhが実際は半分だとしても2か月以上電池が持つ計算になります。
ただし5Vを作る3端子レギュレータにバイポーラタイプ(78L05)を使うとmAオーダーのレギュレータ内消費電流が流れるので待機電流が大幅に増えて電池の持ちがかなり悪くなります。
そのため、レギュレータ内消費電流がμAオーダーと小さいCMOSタイプ(LP2950L-5)を使っています。
CMOSタイプでは電池を接続するときレギュレータ内浮遊容量の影響なのか5V以上の電圧が瞬間的に漏れ出るので、対策として5V側に10μFと少し大きめのコンデンサを入れています。
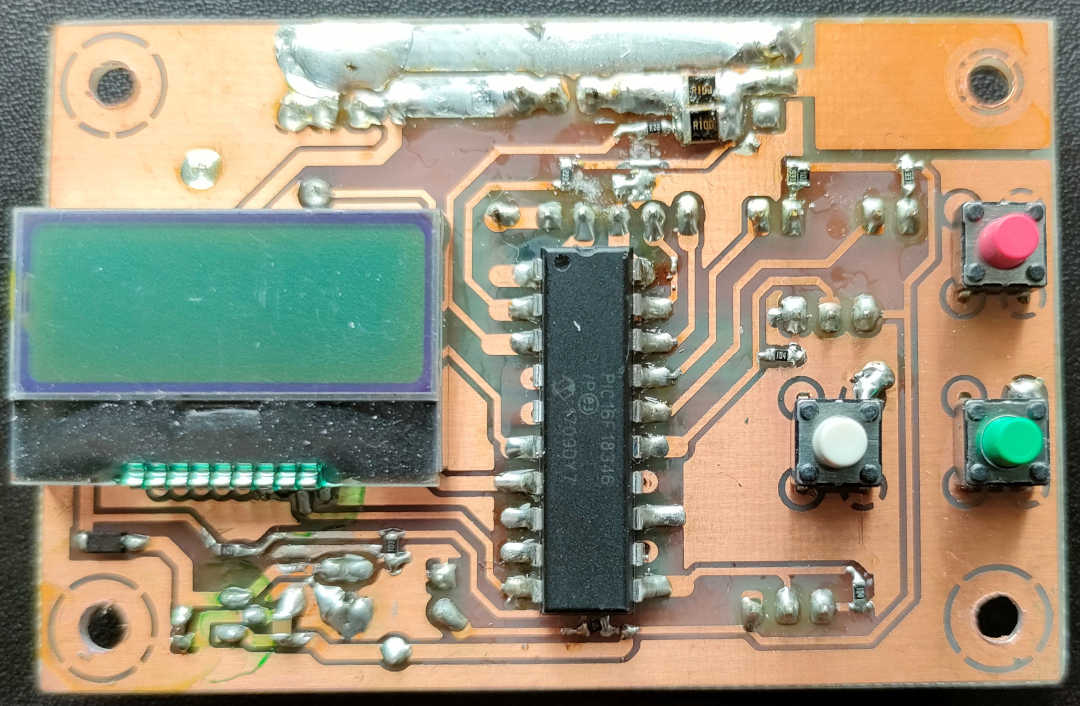
プログラム
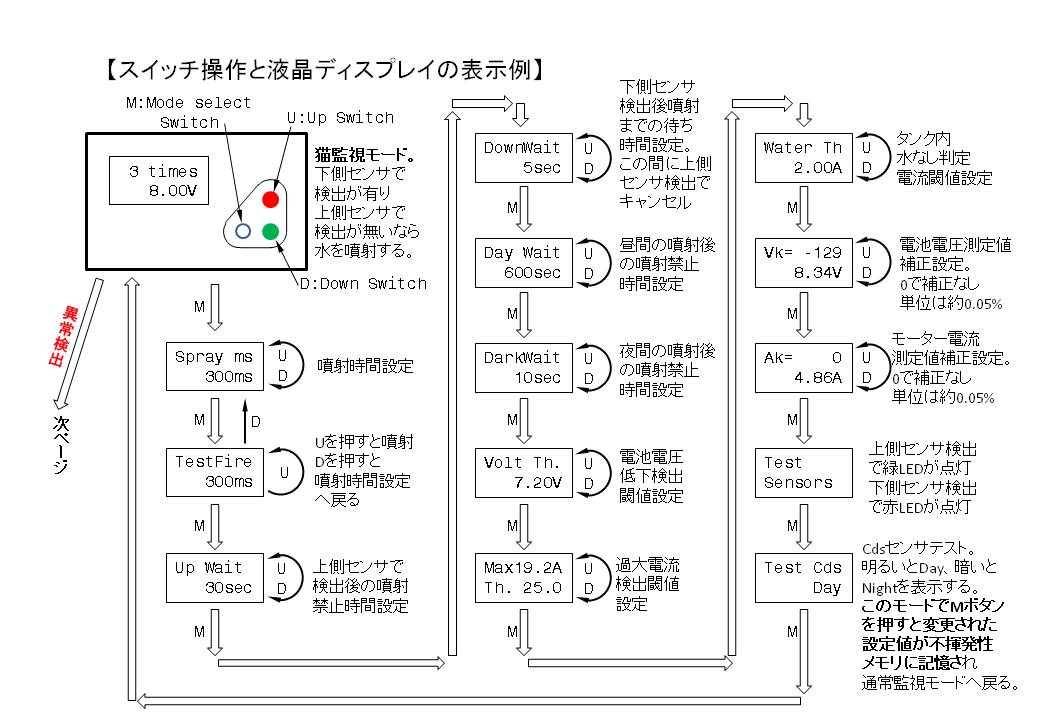
プッシュスイッチで動作テストやセンサ検出後噴射までの待ち時間設定、電池切れ/水切れ/過大電流判定の閾値設定等ができるようにしました。
スイッチ操作によるモード遷移と説明をcat_spray5_mode_select.pdfにまとめました。
なお、スイッチを押すとその後10秒間だけ液晶ディスプレイのバックライトが点灯します。
PICマイコン(PIC16F18346-I/P)用コンパイル済みプログラムを添付します。
cat_spray5.X.production.hex
書き込みツール等については「PICマイコンと開発ツール」のページやWeb情報を参照してください。
スイッチ操作によるモード遷移と説明をcat_spray5_mode_select.pdfにまとめました。
なお、スイッチを押すとその後10秒間だけ液晶ディスプレイのバックライトが点灯します。
PICマイコン(PIC16F18346-I/P)用コンパイル済みプログラムを添付します。
cat_spray5.X.production.hex
書き込みツール等については「PICマイコンと開発ツール」のページやWeb情報を参照してください。
コネクタの接触不良と対策
猫除け装置2台を屋外に設置して半年ほど経った頃、動作が不安定になりました。
原因を調べたらXT60コネクタの端子の一つが黒っぽく変色し、接触不良を起こしていました。
購入したコネクタの端子接触圧が弱かったか、屋外設置で湿気の影響が出たのかもしれません。
猫除け装置2台とも同じ位置の端子が変色していました。
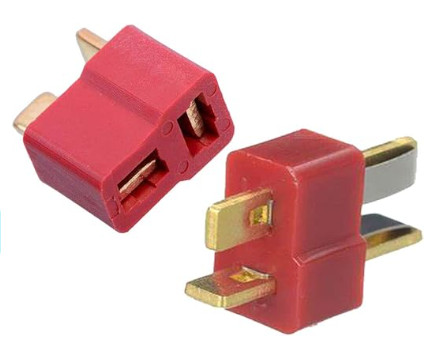
そこでディーンズT型コネクタに交換しました。
T型コネクタは接触面が平面なので接触不良になった場合に磨くのが楽です。
また接触面を板ばねで押し付ける構造なので安心です。
Lipoバッテリーはもともと購入時にこのT型コネクタが付いていたので、XT60ではなくT型を買って接続すべきだったと後悔しました。
原因を調べたらXT60コネクタの端子の一つが黒っぽく変色し、接触不良を起こしていました。
購入したコネクタの端子接触圧が弱かったか、屋外設置で湿気の影響が出たのかもしれません。
猫除け装置2台とも同じ位置の端子が変色していました。
そこでディーンズT型コネクタに交換しました。
T型コネクタは接触面が平面なので接触不良になった場合に磨くのが楽です。
また接触面を板ばねで押し付ける構造なので安心です。
Lipoバッテリーはもともと購入時にこのT型コネクタが付いていたので、XT60ではなくT型を買って接続すべきだったと後悔しました。