ステッピングモーターを使ったスローポイントマシン
はじめに
susukuma鉄道模型チャンネルの動画「PECOポイントマシンを自作する」"の下に出てくるコメントの中にスローポイントの話が出てきました。
ストロークが2mmぐらいしかないNゲージのポイントを実物の様にゆっくり動かすというもので、息子は魅力的というのですが門外漢の私には???です。
ですが技術的課題としては面白いのでチャレンジすることにしました。
ストロークが2mmぐらいしかないNゲージのポイントを実物の様にゆっくり動かすというもので、息子は魅力的というのですが門外漢の私には???です。
ですが技術的課題としては面白いのでチャレンジすることにしました。
ステッピングモーター28BYJ-48を選択した理由
Web検索してみるとラジコン用サーボモーターを使ったものがありました。
ですが、FM90を使ったポイントマシンの所で書いたようにサーボモーターは制御が面倒で費用も高くなります。
FM90を使ったポイントマシンで電圧を下げて低速にできないかも試してみましたが、起動する最低電圧でも一旦回転を始めると速すぎます。
DCモーターではその特性上サーボをかけるか、ギヤの減速比を大幅に変えないかぎり超低速回転はできません。
そこでまたいつものように秋月電子通商で何かないかと探してみたら安くてピッタリなのが見つかりました。
型番が28BYJ-48というステッピングモーターです。
ステッピングモーターはパルス電流を流すことで1ステップずつ動かすことができるモーターです。
28BYJ-48は1回転32ステップのステッピングモーターに1:64の減速器が内蔵されています。
PECO社ポイントのストローク2.2mmを何ステップで切り替えられるか計算すると
さらにPICマイコンのPWM制御でトルク制御し、少し多めのステップ数でポイントを切り替えれば精密な回転位置制御が必要無くなります。
上記のようにスローポイント駆動にピッタリのモーターなのですが、1点注意すべきことがあります。
ギヤが多段構成のため、ギヤの遊びがかなりあります。
そのためPECO社ポイントに組み込まれているバネを外さないと均一な動きになりません。
バネはピアノ線を折り曲げた小さいもので、ピンセットなどで取り外してください。
バネが無くてもモーター+ギヤでポイント切替後のレールの保持力は十分です。
ですが、FM90を使ったポイントマシンの所で書いたようにサーボモーターは制御が面倒で費用も高くなります。
FM90を使ったポイントマシンで電圧を下げて低速にできないかも試してみましたが、起動する最低電圧でも一旦回転を始めると速すぎます。
DCモーターではその特性上サーボをかけるか、ギヤの減速比を大幅に変えないかぎり超低速回転はできません。
そこでまたいつものように秋月電子通商で何かないかと探してみたら安くてピッタリなのが見つかりました。
型番が28BYJ-48というステッピングモーターです。
ステッピングモーターはパルス電流を流すことで1ステップずつ動かすことができるモーターです。
28BYJ-48は1回転32ステップのステッピングモーターに1:64の減速器が内蔵されています。
PECO社ポイントのストローク2.2mmを何ステップで切り替えられるか計算すると
ボードに取り付けた時のボード下面から軸中央までの距離=6mm
取付面からPECO社ポイント駆動点までの距離約2mm
取付台座板厚 Tmmの時のポイント駆動ステップ数≒ 2.2/((6+T+2)✕2✕3.1416)✕32✕64
↓
T=3mm の時、ポイント駆動ステップ数 ≒ 65
T=5mm の時、ポイント駆動ステップ数 ≒ 55
T=10mmの時、ポイント駆動ステップ数 ≒ 40
これだけ細かなステップで駆動できれば滑らかな動きにみえるはずです。取付面からPECO社ポイント駆動点までの距離約2mm
取付台座板厚 Tmmの時のポイント駆動ステップ数≒ 2.2/((6+T+2)✕2✕3.1416)✕32✕64
↓
T=3mm の時、ポイント駆動ステップ数 ≒ 65
T=5mm の時、ポイント駆動ステップ数 ≒ 55
T=10mmの時、ポイント駆動ステップ数 ≒ 40
さらにPICマイコンのPWM制御でトルク制御し、少し多めのステップ数でポイントを切り替えれば精密な回転位置制御が必要無くなります。
上記のようにスローポイント駆動にピッタリのモーターなのですが、1点注意すべきことがあります。
ギヤが多段構成のため、ギヤの遊びがかなりあります。
そのためPECO社ポイントに組み込まれているバネを外さないと均一な動きになりません。
バネはピアノ線を折り曲げた小さいもので、ピンセットなどで取り外してください。
バネが無くてもモーター+ギヤでポイント切替後のレールの保持力は十分です。
動画
28BYJ-48+3Dプリント部品+ドライブ基板 のスローポイント駆動セットを作ってsusukuma鉄道模型チャンネルに送付しました。
Nゲージレイアウトにまだ組み込んでいないようですが、そのうちsusukuma鉄道模型チャンネルに製作動画がアップロードされると思います。
ここではとりあえず試作品のテスト時の動画を載せておきます。
Nゲージレイアウトにまだ組み込んでいないようですが、そのうちsusukuma鉄道模型チャンネルに製作動画がアップロードされると思います。
ここではとりあえず試作品のテスト時の動画を載せておきます。

ピアノ線固定方法とモーターの固定方法
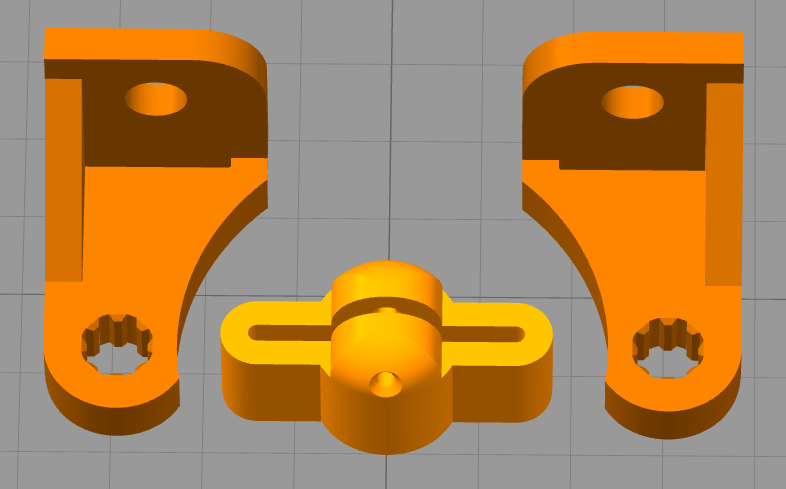
28BYJ-48の出力軸にピアノ線を固定するため、susukuma鉄道模型チャンネルへはネジ止め式の3Dプリント部品を送付しました。
その後、ネジを使わない改良型の3D部品を設計したので3Dプリント用データを添付します。
28BYJ48_PinHolder.stl
スライサーソフトの設定や使用するフィラメントの種類など条件によって穴径が微妙に違ってくると思うので、後加工やスライサーソフトのスケール変更機能で調整してください。
その他の方法としてFM90のポイントマシンで紹介したエポキシパテを使う方法と同様にしてもよいと思います。
FM90に比べて28BYJ-48の出力軸は大きいので容易だと思います。
その後、ネジを使わない改良型の3D部品を設計したので3Dプリント用データを添付します。
28BYJ48_PinHolder.stl
スライサーソフトの設定や使用するフィラメントの種類など条件によって穴径が微妙に違ってくると思うので、後加工やスライサーソフトのスケール変更機能で調整してください。
その他の方法としてFM90のポイントマシンで紹介したエポキシパテを使う方法と同様にしてもよいと思います。
FM90に比べて28BYJ-48の出力軸は大きいので容易だと思います。
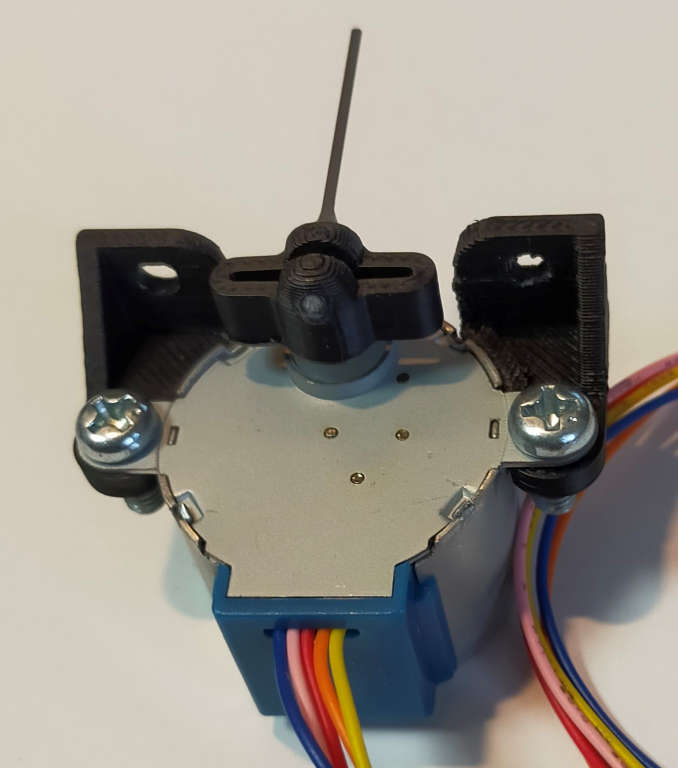
このモーターをFM90のようにグルーガンだけで台板に固定するのは難しそうです。
そこでモーターを固定するための部品も3Dプリントしました。
28BYJ-48_FIX_L.stl
28BYJ-48_FIX_R.stl
モーターの取付穴に使うのはM4ネジです。
ABS樹脂なら弾力があるのでM4ネジを強くねじ込むと止まるように穴の内側に凹凸を付けてあります。
固い場合はM4のタップ加工をするか、4mmドリル刃でバカ穴にしてナットで止めてください。
3Dプリント部品を使わない場合は 木片 や アルミ板 をL字に加工して止めることもできると思います。
台板側の固定は板が厚ければ木ネジが使えます。
板が薄ければ固定部品のふちをグルーガンで止めても良いでしょう。
取付時の注意点
susukuma鉄道模型チャンネルの動画 PECO用 スローアクションポイントマシン ではステッピングモーターの取付に1cm程度の厚い木片をはさんで使っていました。
そのような木片を挟んで取り付けるとモーターからポイントまでの距離が設計想定より離れすぎるため 駆動力が不足したり、ポイントが接触不良になる可能性があります。
さらにポイント切替に必要な回転角が減少し切り替えが速くなります。
ですのでモーター固定部品と台板間に木片など挟まず、直に台板に固定してください。
(試作品のテスト時の動画 の後半 18秒以降をご参照ください。)
台板が薄い場合は小さな木ネジを使うか、ゴム系接着剤とグルーガンを併用するなど工夫してください。
なお、上記についてはsusukuma鉄道模型チャンネルでも気づいて修正したとのことです。
susukuma鉄道模型チャンネルの動画 PECO用 スローアクションポイントマシン ではステッピングモーターの取付に1cm程度の厚い木片をはさんで使っていました。
そのような木片を挟んで取り付けるとモーターからポイントまでの距離が設計想定より離れすぎるため 駆動力が不足したり、ポイントが接触不良になる可能性があります。
さらにポイント切替に必要な回転角が減少し切り替えが速くなります。
ですのでモーター固定部品と台板間に木片など挟まず、直に台板に固定してください。
(試作品のテスト時の動画 の後半 18秒以降をご参照ください。)
台板が薄い場合は小さな木ネジを使うか、ゴム系接着剤とグルーガンを併用するなど工夫してください。
なお、上記についてはsusukuma鉄道模型チャンネルでも気づいて修正したとのことです。
回路
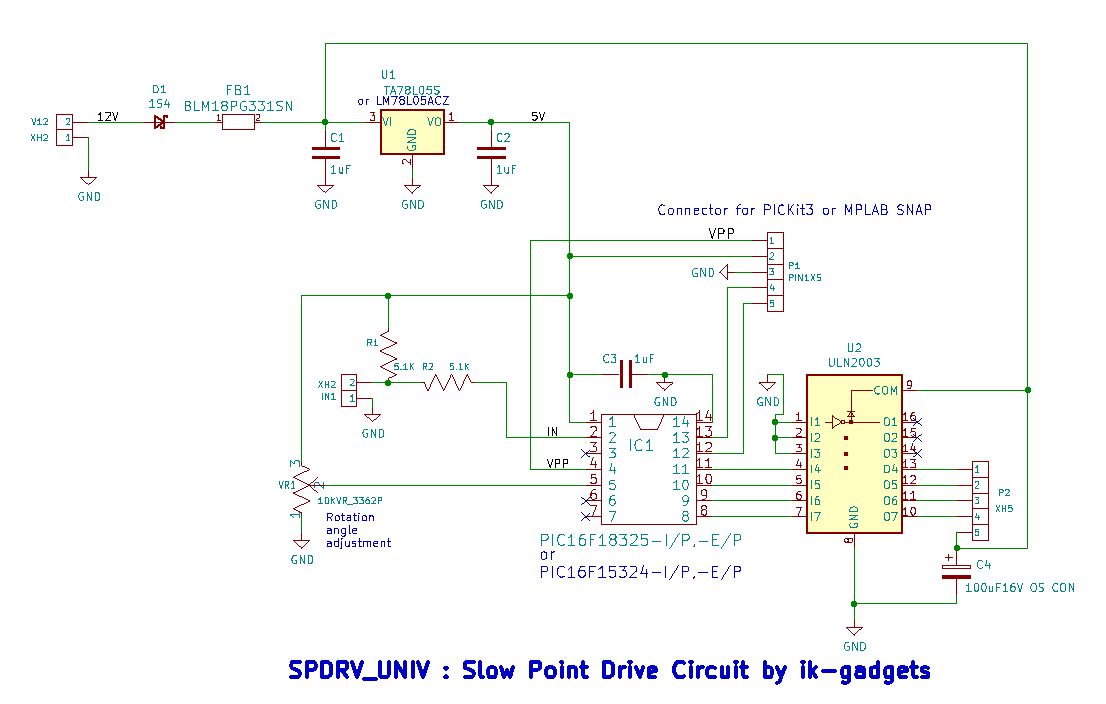
ユニバーサル基板(2.54mmピッチ穴あき基板)用のスローポイントドライブ回路図です。
電源入力端子V12に接続したショットキーダイオード(1S4)は電源逆接時の保護用です。
自作でいろいろいじっていると結構な確率で勘違いや瞬間的な接触事故が起きて(私だけ?)、PICマイコンが音もなく御臨終となります。
これが無くても回路的に問題ありませんが、20円で不幸な事故を防げますので入れています。
FB1(BLM18PG331SN)はフェライトビーズとよばれるノイズフィルタです。
これも入れなくてもポイント動作に影響はありません。
ノイズを外に出さないためと、経験上ショート事故で大電流が流れた時にはヒューズのように切れてくれるようなので入れています。
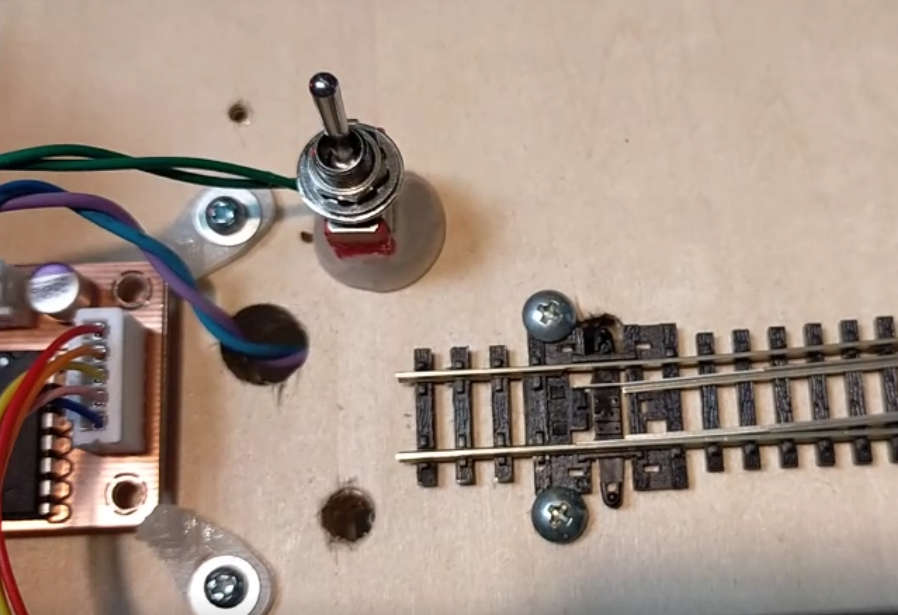
IN1にはトグルスイッチを接続します。
トグルスイッチはON/OFFできればよいので2端子、3端子どちらでもOKです。
R2は入力の保護(静電気や接触事故)のために入れてありますが無しでも動作します。
VR1の半固定抵抗はモーターを取り付ける台板の厚みに応じて回転角度を調整するためのものです。
PICマイコンのA/D変換入力で電圧を読み取り、ポイント切り替え毎の駆動ステップ数を調整します。
2022/11/28追記:PIC16F15324も使えるようにプログラムを移植しました。
電源入力端子V12に接続したショットキーダイオード(1S4)は電源逆接時の保護用です。
自作でいろいろいじっていると結構な確率で勘違いや瞬間的な接触事故が起きて(私だけ?)、PICマイコンが音もなく御臨終となります。
これが無くても回路的に問題ありませんが、20円で不幸な事故を防げますので入れています。
FB1(BLM18PG331SN)はフェライトビーズとよばれるノイズフィルタです。
これも入れなくてもポイント動作に影響はありません。
ノイズを外に出さないためと、経験上ショート事故で大電流が流れた時にはヒューズのように切れてくれるようなので入れています。
IN1にはトグルスイッチを接続します。
トグルスイッチはON/OFFできればよいので2端子、3端子どちらでもOKです。
R2は入力の保護(静電気や接触事故)のために入れてありますが無しでも動作します。
VR1の半固定抵抗はモーターを取り付ける台板の厚みに応じて回転角度を調整するためのものです。
PICマイコンのA/D変換入力で電圧を読み取り、ポイント切り替え毎の駆動ステップ数を調整します。
2022/11/28追記:PIC16F15324も使えるようにプログラムを移植しました。
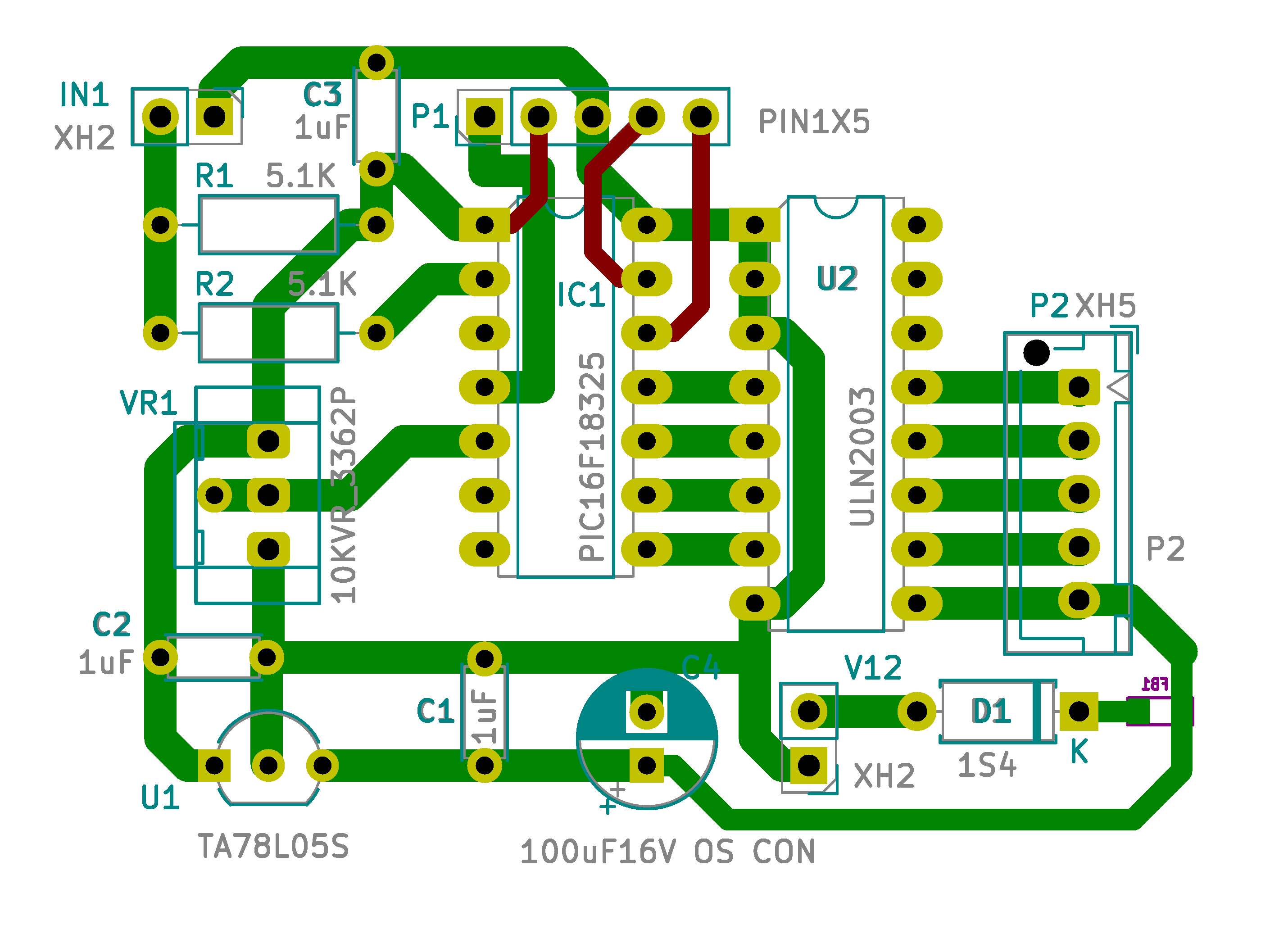
ユニバーサル基板実装
ユニバーサル基板(2.54mmピッチ穴あき基板)を使った配線例です。
【表面(部品面)】
写真の実装例では電源とスイッチのコネクタとして2.54mmピッチのピンヘッダを使っていますが、配線を直にはんだ付けしても良いですしXHコネクタでも良いでしょう。
モーターと接続する5ピンのXHコネクタの向きに注意してください。
ダイオード1S4は線の入っている方がカソード(マイナス側)です。
逆のアノード(プラス側)を電源コネクタPW1に接続してください。
PICマイコンとトランジスタアレイULN2003は半円のへこみ近くの丸マークが1ピンです。
【表面(部品面)】
【表面(部品面)】
写真の実装例では電源とスイッチのコネクタとして2.54mmピッチのピンヘッダを使っていますが、配線を直にはんだ付けしても良いですしXHコネクタでも良いでしょう。
モーターと接続する5ピンのXHコネクタの向きに注意してください。
ダイオード1S4は線の入っている方がカソード(マイナス側)です。
逆のアノード(プラス側)を電源コネクタPW1に接続してください。
PICマイコンとトランジスタアレイULN2003は半円のへこみ近くの丸マークが1ピンです。
【表面(部品面)】
.jpg)
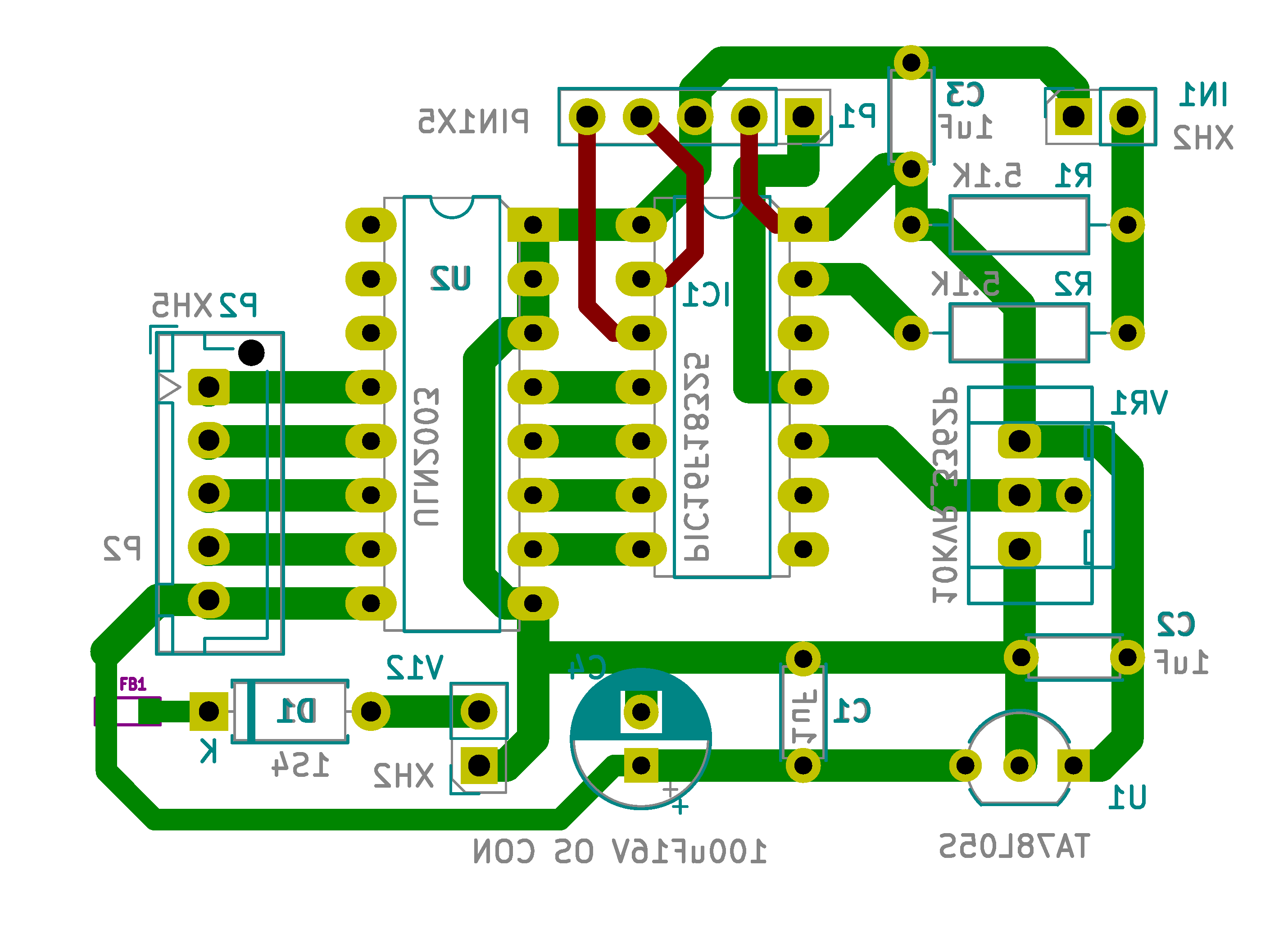
【裏面(配線面)】
フェライトビーズのみ裏面にはんだ付けします。
.jpg)
【SPDRV_UNIV基板部品表】(2021年7月調べ@秋月電子通商)
| 種類 | 数量 | 秋月通販コード | コメント |
|---|---|---|---|
| 5.1KΩ抵抗 | 2 | R-07832 | 1パック100本入り |
| BLM18PG331SN | 1 | P-04443 | 1パック25個入りフェライトビーズ |
| 1uFコンデンサ | 3 | P-03093 | 1パック10個入り |
| 100uF固体電解コンデンサ | 1 | P-08290 | 耐圧16V |
| TA78L05S(注4) | 1 | I-08973 | 5V 100mAレギュレータ |
| PIC16F18325-I/P(注5) | 1 | I-10890 | DIP14ピンPICマイコン |
| ULN2003 | 1 | I-15239 | トランジスタアレイ 1パック5個入り |
| 10KΩ半固定抵抗 | 1 | P-03277 | 3362P |
| 1S4 | 1 | I-00127 | 40V 1A ショットキーダイオード |
| XHコネクタ5ピン(注1) | 1 | C-12250 | 配線側はC-12258+端子C-12264 |
| 5ピン ピンヘッダ | 1 | C-00167 | 1✕40ピンから5ピンを切り出し(注3) |
| 2ピン ピンヘッダ(注2) | 2 | C-00167 | 1✕40ピンから2ピンを切り出し(注3) |
| ユニバーサル基板 | 1 | P-02628 | 片面穴あき基板72✕48mm |
(注2) XHコネクタ2ピンを使う場合はC-12247、配線側はC-12255+端子C-12264
(注3)ピンヘッダに接続するソケットは 分割ロングピンソケット(秋月通販コードC-05779)を分割して使用している。
(注4)LP2950L-5から変更しました。
LP2950L-5を使う場合はC2を10μF以上(例:秋月電子 通販コード P-02184)にしてください。
理由の詳細 ==> 緊急報告:電源投入方法依存の故障発生
(注5)PIC16F15324-I/P,-E/Pも使用可能
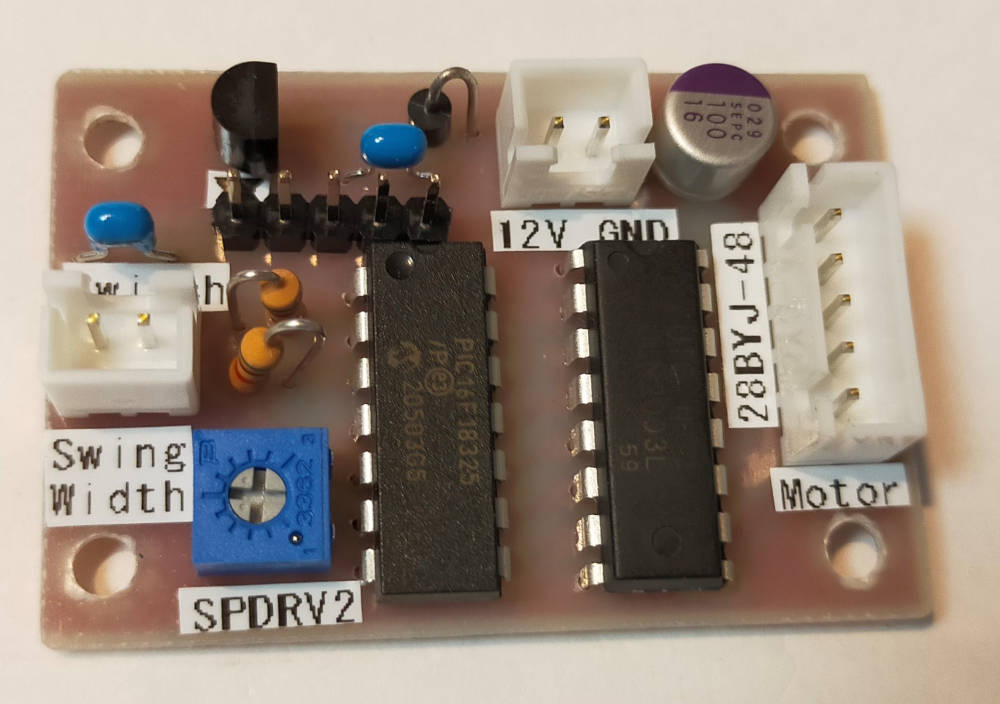
感光基板実装
サンハヤトの感光基板で作る場合の資料をpdfにしました。
回路図、ドリルマップ、100✕75の感光基板用の✕4のマスクパターン、✕1のマスクパターン、部品配置図が入っています。
SPDRV2_print.pdf
✕4のマスクパターンはサンハヤトの片面ガラスコンポジット感光基板100✕75✕1mm NZ-E40K 用に作りました。
この基板はsusukuma鉄道模型チャンネルに送った初期バージョンのSMD(表面実装)部品を半田付けしやすいリード線付部品に替えたものです。
回路は上記ユニバーサル基板とほぼ同じですが、配線の引き回しの都合でU2とP2の交換可能なピン接続を変えています。
あと、ユニバーサル基板の2ピンのピンヘッダをXHコネクタに替えています。
PICプログラムはユニバーサル基板と同じで下記添付のSPDRV.X.production.hexです。
試作して動作確認したので写真を追加しました。(2021/8/13)
【表面(部品面)】
回路図、ドリルマップ、100✕75の感光基板用の✕4のマスクパターン、✕1のマスクパターン、部品配置図が入っています。
SPDRV2_print.pdf
✕4のマスクパターンはサンハヤトの片面ガラスコンポジット感光基板100✕75✕1mm NZ-E40K 用に作りました。
この基板はsusukuma鉄道模型チャンネルに送った初期バージョンのSMD(表面実装)部品を半田付けしやすいリード線付部品に替えたものです。
回路は上記ユニバーサル基板とほぼ同じですが、配線の引き回しの都合でU2とP2の交換可能なピン接続を変えています。
あと、ユニバーサル基板の2ピンのピンヘッダをXHコネクタに替えています。
PICプログラムはユニバーサル基板と同じで下記添付のSPDRV.X.production.hexです。
試作して動作確認したので写真を追加しました。(2021/8/13)
【表面(部品面)】
【裏面(配線面)】
フェライトビーズのみ裏面にはんだ付けします。

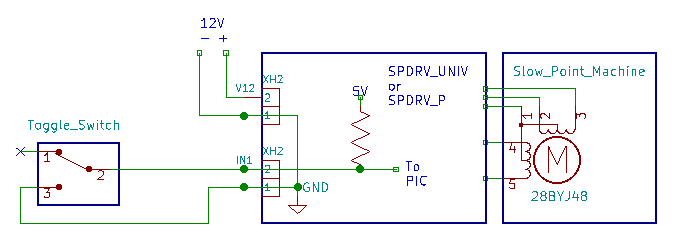
ポイント切替スイッチの接続
ポイント切替スイッチがスローポイント専用であれば図のようにトグルスイッチを直接接続します。
2端子ではなく3端子のトグルスイッチならば1端子は未接続となります。
2端子ではなく3端子のトグルスイッチならば1端子は未接続となります。
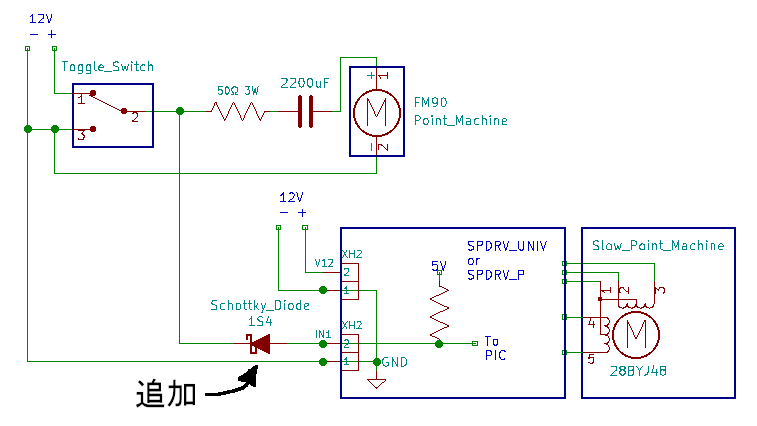
ポイント切替スイッチがFM90を使ったポイントマシンと共通の場合は、入力端子IN1の耐圧が5Vなので直接接続ができません。
その場合は図のようにダイオードを入れれば接続可能です。
ダイオードの向きは白い線が入っている側をスイッチに接続します。
その場合は図のようにダイオードを入れれば接続可能です。
ダイオードの向きは白い線が入っている側をスイッチに接続します。
PICマイコンプログラミング
スローポイントドライブのPIC16F18325用プログラム(HEXファイル)を添付します。
PIC16F18325-I/P,-E/P用: SPDRV.X.production.hex
PIC16F15324-I/P,-E/P用: SPDRV_PIC16F15324.X.production.hex
PIC16F18325-I/P,-E/P用: SPDRV.X.production.hex
PIC16F15324-I/P,-E/P用: SPDRV_PIC16F15324.X.production.hex
上記HEXファイルをダウンロード(右クリック-->名前を付けてリンク先を保存)してローカルPCに置きます。
基板に電源を供給し、MPLAB SNAP等のPIC書込みツールをPCと基板に接続します。
MPLAB IPEを起動してconnectボタンを押し、チップの型番 PIC16F18325とダウンロードしたHEXファイルを指定し
左上[settings]をクリック-->Release from Resetをクリックしてから【注:Hold on Reset解除】
programボタンを押して書き込みます。
書き込みツール等については「PICマイコンと開発ツール」のページやWeb情報を参照してください。
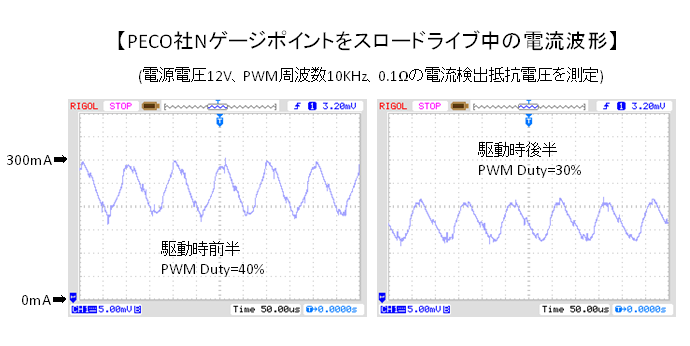
駆動時電流実測値
PECO社ポイントをスロードライブしたときの電流波形をオシロで計測しました。
ポイント切替時は前半と後半でPWMデューティー比を40%と30%に変えているので、それぞれの波形の一部を表示しています。
最大300mA程度です。ポイント切替が終了すると電流は流れなくなりますがモーター+ギヤによる保持力は十分あります。
ポイント切替時は前半と後半でPWMデューティー比を40%と30%に変えているので、それぞれの波形の一部を表示しています。
最大300mA程度です。ポイント切替が終了すると電流は流れなくなりますがモーター+ギヤによる保持力は十分あります。