遮断棒駆動装置(4モーター)
はじめに
踏切の1モータ―バージョンでは遮断棒の動きが4本同時になり、本物のように踏切進入側が先に降りる動作はできません。
息子(susukuma鉄道模型チャンネル)からは、ボード裏の仕掛けが大きくなっても良いので、よりリアルな動きが望ましいと言われました。
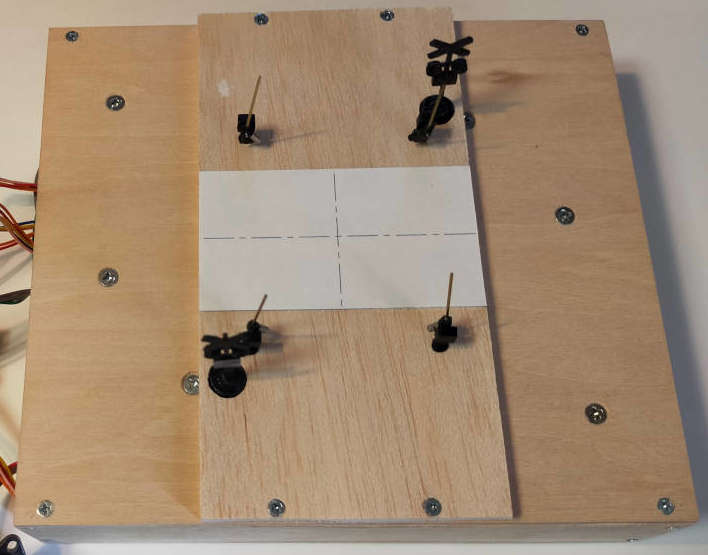
そこでモーターを4個に増やしたものを作ってみました。
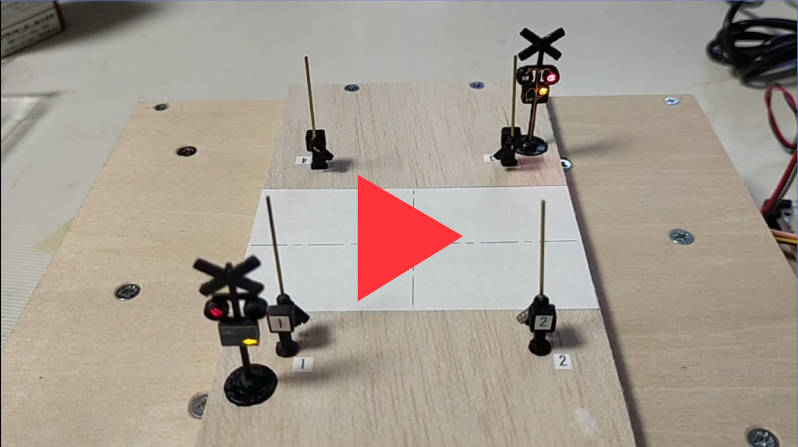
4モーター版では本物のように遮断棒の時間差降下が可能です。
またモーター配置の変更で単線の線路幅に対応した遮断棒配置も可能となります。
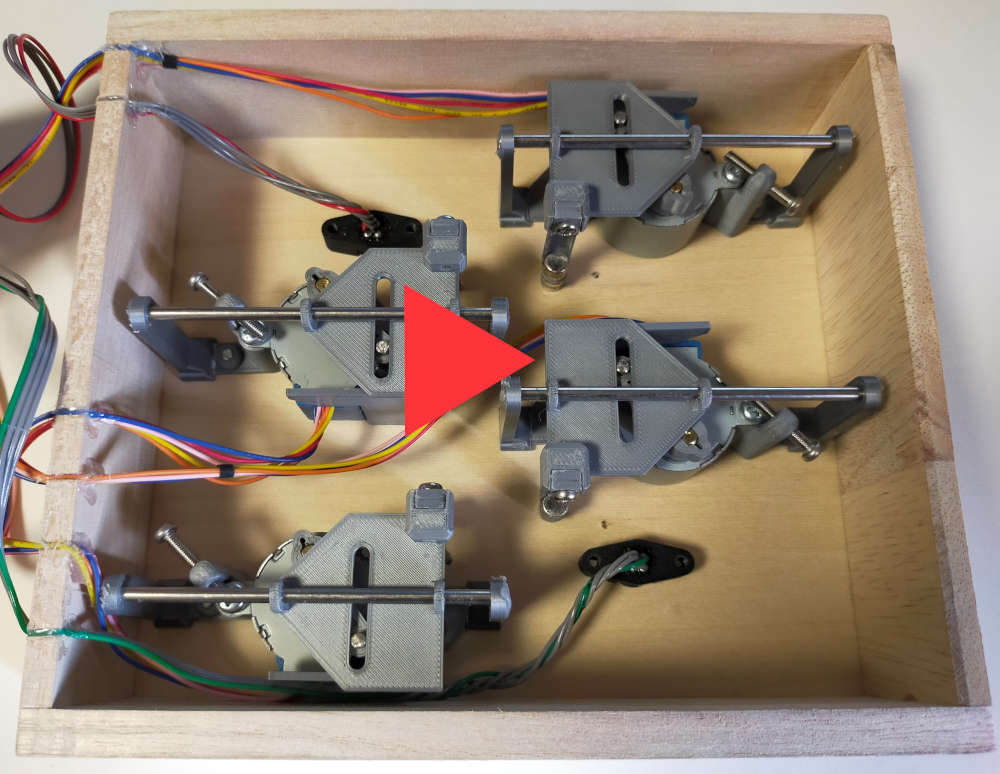
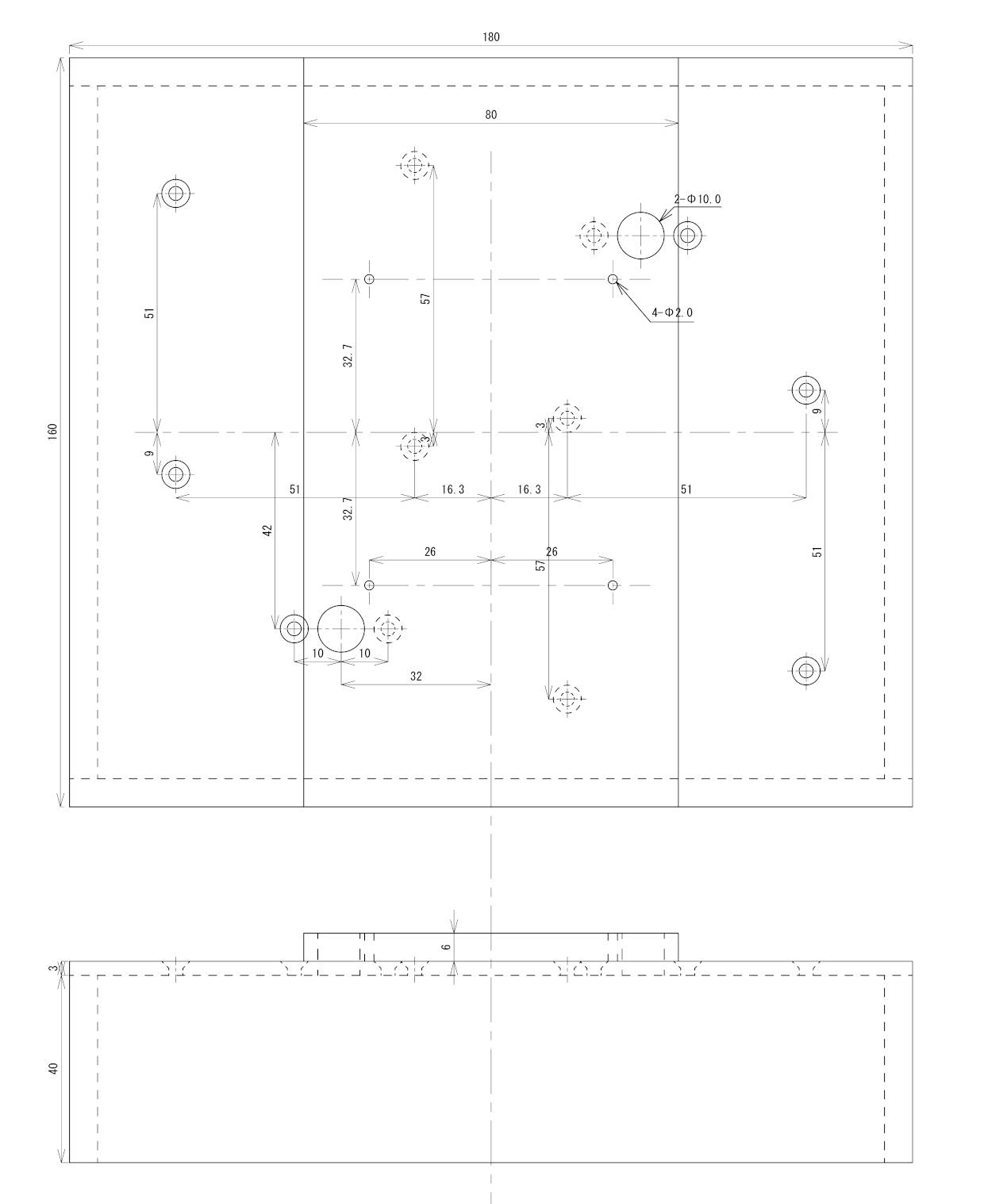
台板裏の駆動機構が占めるエリアサイズは1モータ版で10cm✕10cmだったものが18cm✕16cmに拡大します。
12V電源電流も1モーターが300mA程度だったのが1A程度に増加します。
息子(susukuma鉄道模型チャンネル)からは、ボード裏の仕掛けが大きくなっても良いので、よりリアルな動きが望ましいと言われました。
そこでモーターを4個に増やしたものを作ってみました。
4モーター版では本物のように遮断棒の時間差降下が可能です。
またモーター配置の変更で単線の線路幅に対応した遮断棒配置も可能となります。
台板裏の駆動機構が占めるエリアサイズは1モータ版で10cm✕10cmだったものが18cm✕16cmに拡大します。
12V電源電流も1モーターが300mA程度だったのが1A程度に増加します。
【2022/8/28追記】
susukuma鉄道模型チャンネルでこの踏切を鉄道模型レイアウトに組み込む動画が公開されました。
https://www.youtube.com/watch?v=bm8cDm65mbI
susukuma鉄道模型チャンネルでこの踏切を鉄道模型レイアウトに組み込む動画が公開されました。
https://www.youtube.com/watch?v=bm8cDm65mbI
使用部品
3Dプリント部品以外で使った材料は以下の通りです。
・28BYJ-48 (ギア付ステッピングモーター)✕4個
・Φ3.0ステンレス棒またはアルミ棒 長さ80mm✕4本、長さ 8.0mm✕4本
(注)ステンレス棒はすべりが良く強度も高い。 ただし電動工具が無いと切断や切削による長さ調整が大変なので、マニュアルで加工する場合はアルミ材を推奨する。
・M3ネジ 10mm皿ネジ✕12本、20mmナベネジ✕8本
・M4ネジ 10mmナベネジ✕8本
・28BYJ-48 (ギア付ステッピングモーター)✕4個
・Φ3.0ステンレス棒またはアルミ棒 長さ80mm✕4本、長さ 8.0mm✕4本
(注)ステンレス棒はすべりが良く強度も高い。 ただし電動工具が無いと切断や切削による長さ調整が大変なので、マニュアルで加工する場合はアルミ材を推奨する。
・M3ネジ 10mm皿ネジ✕12本、20mmナベネジ✕8本
・M4ネジ 10mmナベネジ✕8本
・強力マグネット 直径6mm厚さ3mm✕16個
(ダイソー超強力マグネットミニ8個入り✕2パック)
(ダイソー超強力マグネットミニ8個入り✕2パック)

・板材 180✕160✕3mm✕1枚
(天板用で航空べニアが加工しやすいが、塩ビ板、アクリル板などでも可)
・板材 160✕80✕6mm✕1枚
(テスト&調整用かさ上げ板、6mm≒消音コルク板厚+レール高さ)
・板材 180✕40✕6mm ✕2枚(側板用)
・板材 148✕40✕6mm ✕2枚(側板用)
・木ネジ 長さ10~12mm✕4本(かさ上げ板仮固定用)
・3Dプリント部品用の接着剤
・瞬間接着剤
・木工用接着剤
必要なドリル刃、タップは以下の通り。
・3Dプリント部品仕上げ加工用ドリル:Φ3.0mm、Φ3.1mm
・3Dプリント部品仕上げ加工用タップ:M3タップ、M4タップ
・天板穴あけに必要なドリル:Φ2.0mm、Φ10.0mm、Φ3.0mm+皿ネジザグリ用面取りカッター
・3Dプリント部品仕上げ加工用タップ:M3タップ、M4タップ
・天板穴あけに必要なドリル:Φ2.0mm、Φ10.0mm、Φ3.0mm+皿ネジザグリ用面取りカッター
3Dプリント部品
使用した3Dプリント用データを添付します。
スライサーでgcode(3Dプリンタ制御命令)を生成するとき、樹脂の充填率は100%を指定します。
スライサーでgcode(3Dプリンタ制御命令)を生成するとき、樹脂の充填率は100%を指定します。
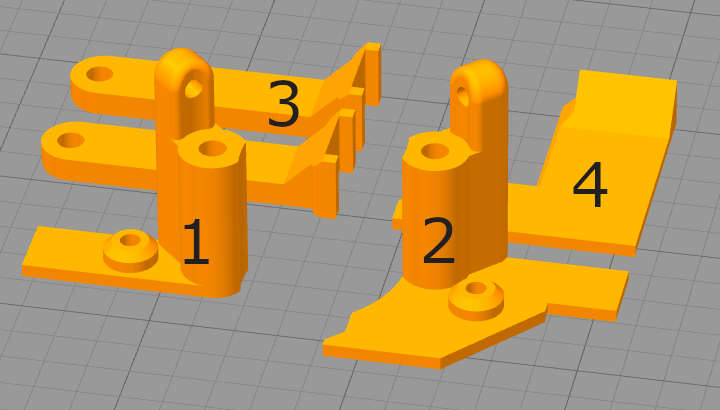
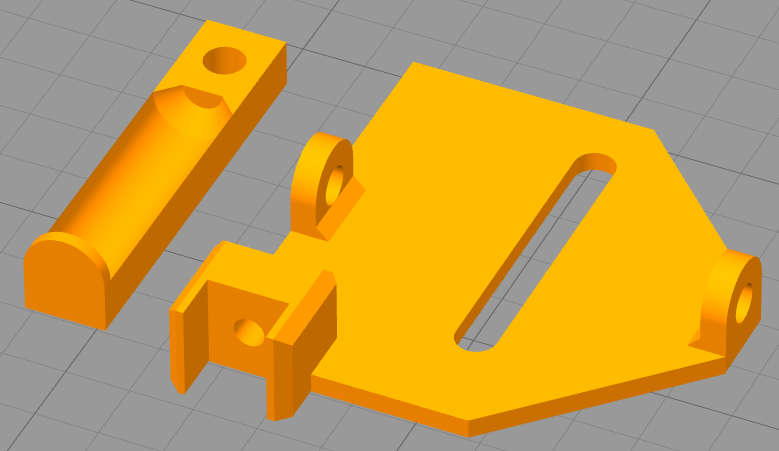
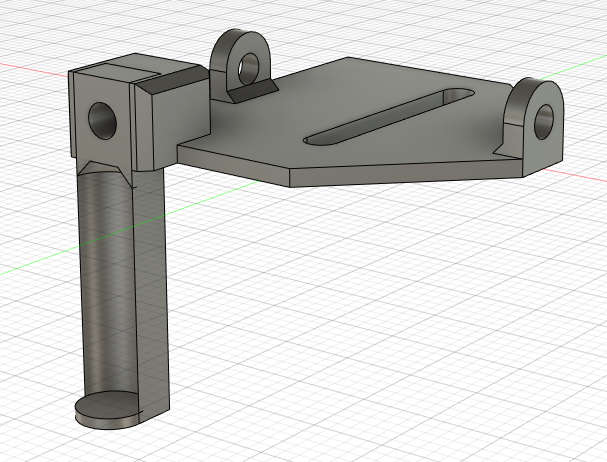
Linear_M4_B_1.stl 必要数4 (図の1)
Linear_M4_B_2.stl 必要数4 (図の2)
Linear_M4_B_3.stl 必要数8 (図の3)
Linear_M4_B_4.stl 必要数4 (図の4)
3はΦ3金属棒が入る穴をΦ3.0のドリルで仕上げ加工します。
1と2はモーター取付用の穴をM4タップ加工し、残りの穴をM3タップ加工します。
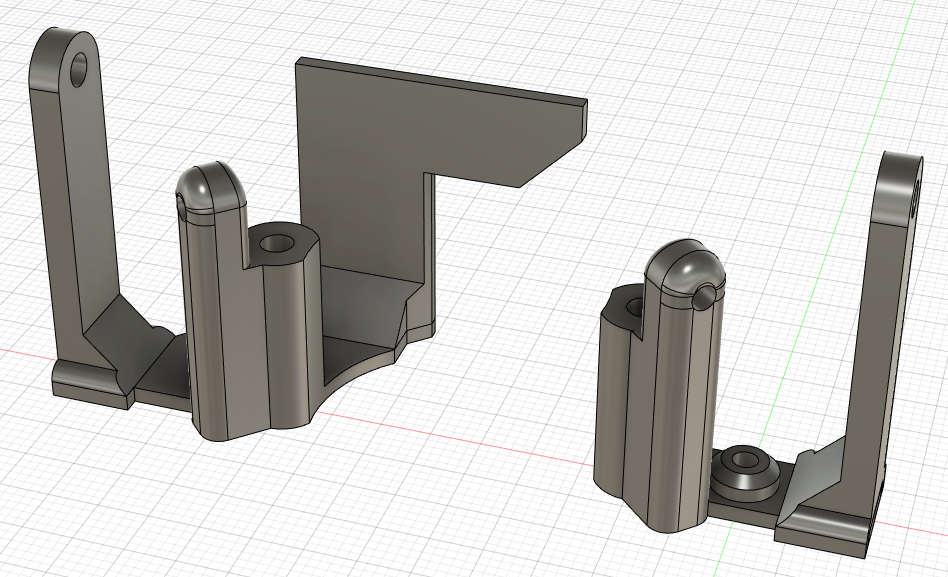
穴加工後、図のように1と3、2と3と4を接着します。
図は1モーター取付分なので、これらを4組作ります。
Linear_M4_B_2.stl 必要数4 (図の2)
Linear_M4_B_3.stl 必要数8 (図の3)
Linear_M4_B_4.stl 必要数4 (図の4)
3はΦ3金属棒が入る穴をΦ3.0のドリルで仕上げ加工します。
1と2はモーター取付用の穴をM4タップ加工し、残りの穴をM3タップ加工します。
穴加工後、図のように1と3、2と3と4を接着します。
図は1モーター取付分なので、これらを4組作ります。
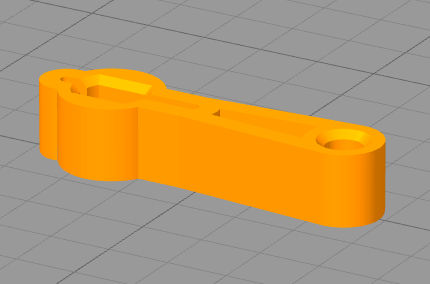
Linear_M4_S_1.stl 必要数4
Linear_M4_S_2.stl 必要数4
スライダーのデータです。
Φ3.0mmの金属棒を通す穴2か所をΦ3.1のドリルで仕上げ加工します。
図のように接着し、4組作ります。
接着するかわりにM3タップ加工してM3ネジで結合することもできます。
Linear_M4_S_2.stl 必要数4
スライダーのデータです。
Φ3.0mmの金属棒を通す穴2か所をΦ3.1のドリルで仕上げ加工します。
図のように接着し、4組作ります。
接着するかわりにM3タップ加工してM3ネジで結合することもできます。
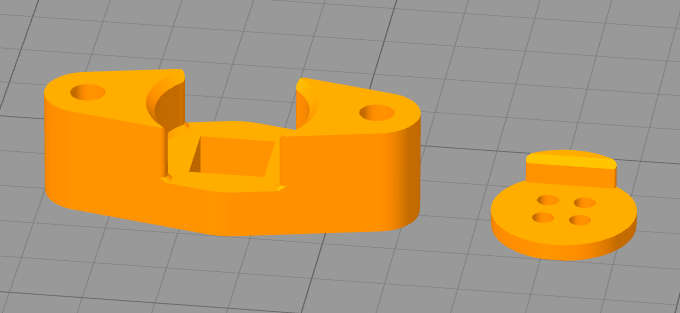
cross_con_base_1.stl
cross_con_base_2.stl
今回 踏切警報灯を天板に直接接着せず、受け側コネクタを皿ネジで天板に固定して警報灯を抜き差しできるようにしました。 そのための部品です。
信号機の組立と同様に2ピンの丸ピンコネクタ2個を4つ穴の開いたcross_con_base_2に金属ピン部を挿しこんで瞬間接着剤で接着します。
それをcross_con_base_1に接着し、両端の取付穴をM3タップで溝切加工します。
cross_con_base_2.stl
今回 踏切警報灯を天板に直接接着せず、受け側コネクタを皿ネジで天板に固定して警報灯を抜き差しできるようにしました。 そのための部品です。
信号機の組立と同様に2ピンの丸ピンコネクタ2個を4つ穴の開いたcross_con_base_2に金属ピン部を挿しこんで瞬間接着剤で接着します。
それをcross_con_base_1に接着し、両端の取付穴をM3タップで溝切加工します。

組立
3mm厚天板に側板4枚を接着します。
3mm厚天板とテスト用の6mm厚かさ上げ板にLinear_M4_box_2D.pdfの穴あけ加工をします。
皿ネジの頭が飛び出ないよう、穴あけのあと皿ネジ用のザグリ加工をします。
3mm厚天板とテスト用の6mm厚かさ上げ板にLinear_M4_box_2D.pdfの穴あけ加工をします。
皿ネジの頭が飛び出ないよう、穴あけのあと皿ネジ用のザグリ加工をします。
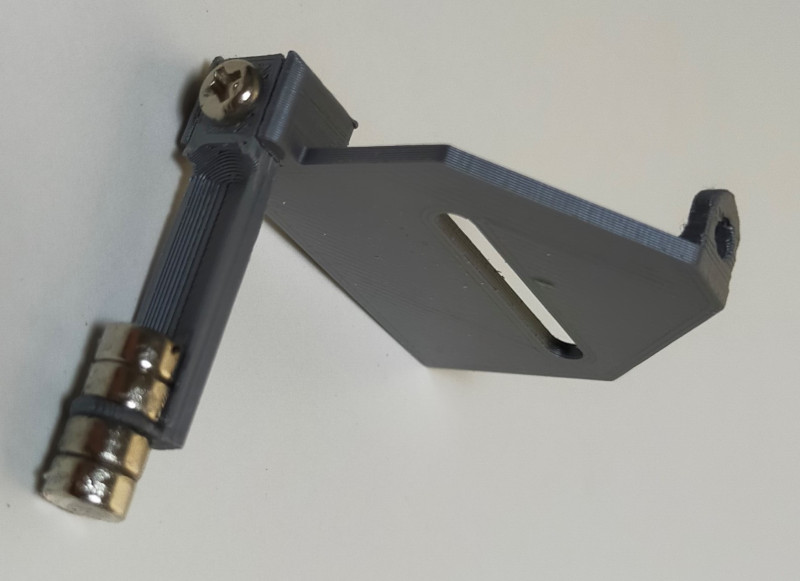
スライダー(Linear_M4_S)にΦ6✕3mmの強力磁石を天板に接触する側に2個、逆側にも2個、瞬間接着剤で取り付けます。
!!!注意!!! 遮断棒の磁石と天板側の磁石面が引き合う向きで接着します。
モーターアームに長さ8mmの金属棒を圧入し、モーターに取り付けます。
M4ネジでモーターにベース(Linear_M4_B_*)を取り付けます。
ベースにアームの振れ幅調整用M3✕20mm のネジを2本取り付けます。
Φ3✕80mmの金属棒にスライダー(Linear_M4_S)を通します。
ここでスライダーが滑らかに動くか確認し、引っかかるようなら修正します。
スライダーのスリットにモーターアームに圧入したピンの頭が入るよう位置合わせして金属棒をベースに取り付けます。
金属棒とベースのかみ合わせが緩いようなら瞬間接着剤で固定します。
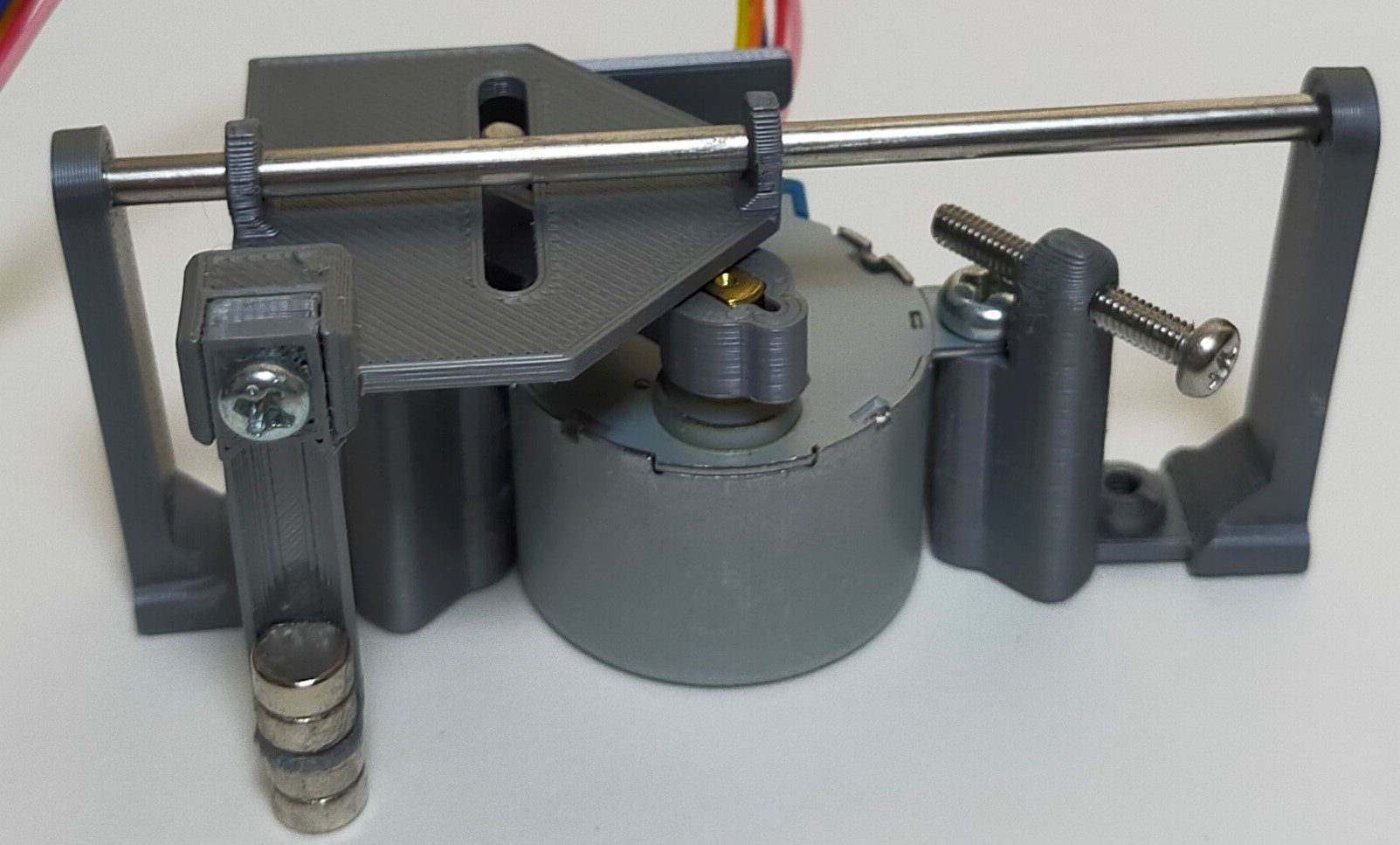
組み立てたモーター+ベース+スライダー4組を皿ネジで天板に取り付けます。
踏切警報灯の受けコネクタをM3✕10mmの皿ネジで天板に取り付けます。
コネクタ差し込み口の凸部が警報灯の正面になるので凸部を外に向けて取り付けます。