踏切用回路(4モーター用)
コネクタ接続について
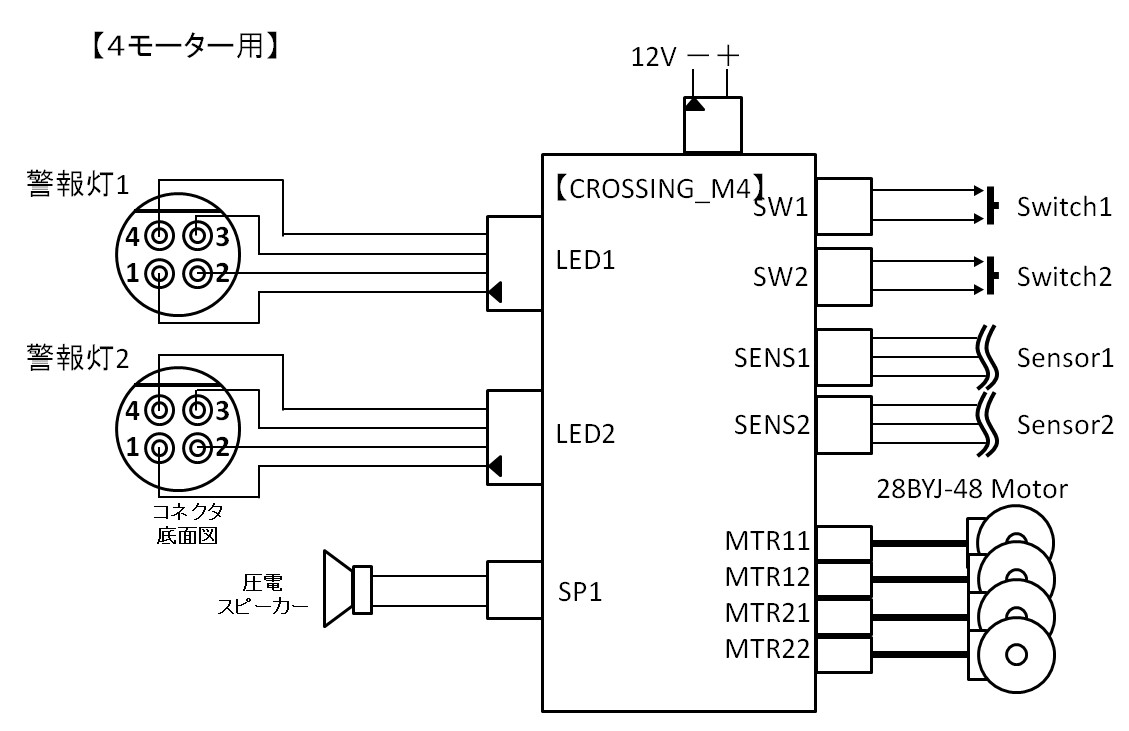
コネクタ接続は1モーター用と以下の3点の違いがあります。
・モーター用コネクタ数(✕1 --> ✕4)
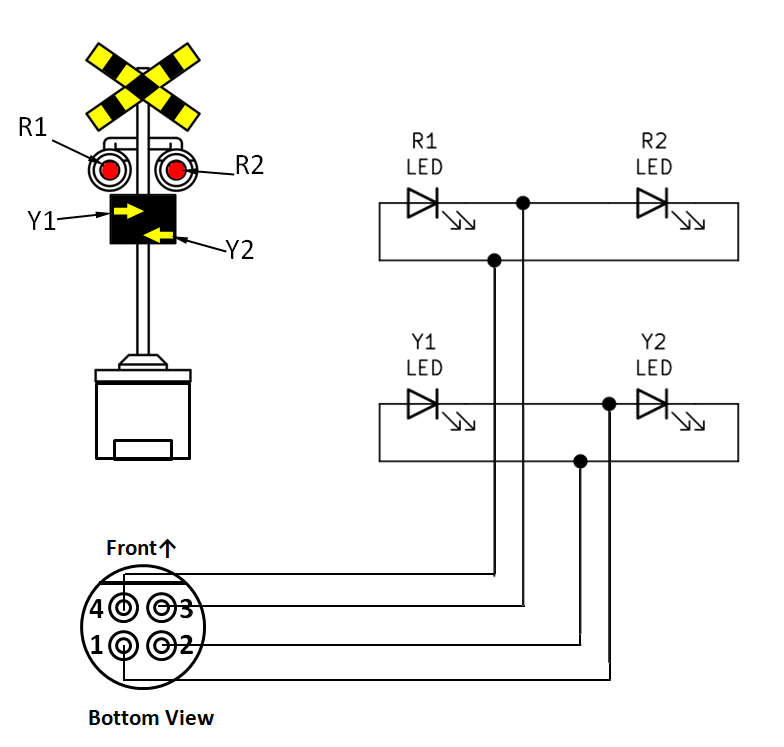
・警報灯との接続(2ピンコネクタ✕2-->4ピンコネクタ✕2)
・スピーカー出力が圧電スピーカー専用になった
複線の各線路に対応して車両センサー(フォトリフレクタTPR-105)と手動操作用スイッチのインターフェイスを持ちます。
スイッチはセンサー無しで手動操作する場合はトグル型、センサー有でスイッチはテストやタイミング設定、音量設定がメインならプッシュ型が良いでしょう。
圧電スピーカー(別名圧電ブザー、圧電サウンダ)は直径が30mm以上の大き目のものが音質的にお勧めです。
電源電圧は12V、電流は遮断棒4本駆動時に1A程度です。(モーターの駆動力設定用半固定抵抗で変わる)
私が使った圧電スピーカー、モーター、LEDの型番(秋月電子通商)は以下の通りです。
・モーター用コネクタ数(✕1 --> ✕4)
・警報灯との接続(2ピンコネクタ✕2-->4ピンコネクタ✕2)
・スピーカー出力が圧電スピーカー専用になった
複線の各線路に対応して車両センサー(フォトリフレクタTPR-105)と手動操作用スイッチのインターフェイスを持ちます。
スイッチはセンサー無しで手動操作する場合はトグル型、センサー有でスイッチはテストやタイミング設定、音量設定がメインならプッシュ型が良いでしょう。
圧電スピーカー(別名圧電ブザー、圧電サウンダ)は直径が30mm以上の大き目のものが音質的にお勧めです。
電源電圧は12V、電流は遮断棒4本駆動時に1A程度です。(モーターの駆動力設定用半固定抵抗で変わる)
私が使った圧電スピーカー、モーター、LEDの型番(秋月電子通商)は以下の通りです。
| 種類 | 型番 | 秋月通販コード |
|---|---|---|
| 圧電スピーカー | SPT15 | P-04228 |
| ギヤ付ステッピングモーター | 28BYJ-48 | P-13256 |
| 黄色1608サイズLED | SML-E12Y8WT86 | I-11880 |
| 赤色1608サイズLED | OSR50603C1E | I-08274 |
感光基板実装
サンハヤトの片面ガラスコンポジット感光基板(150mm✕100mm✕1.0mm、NZ-E43K)で試作しました。
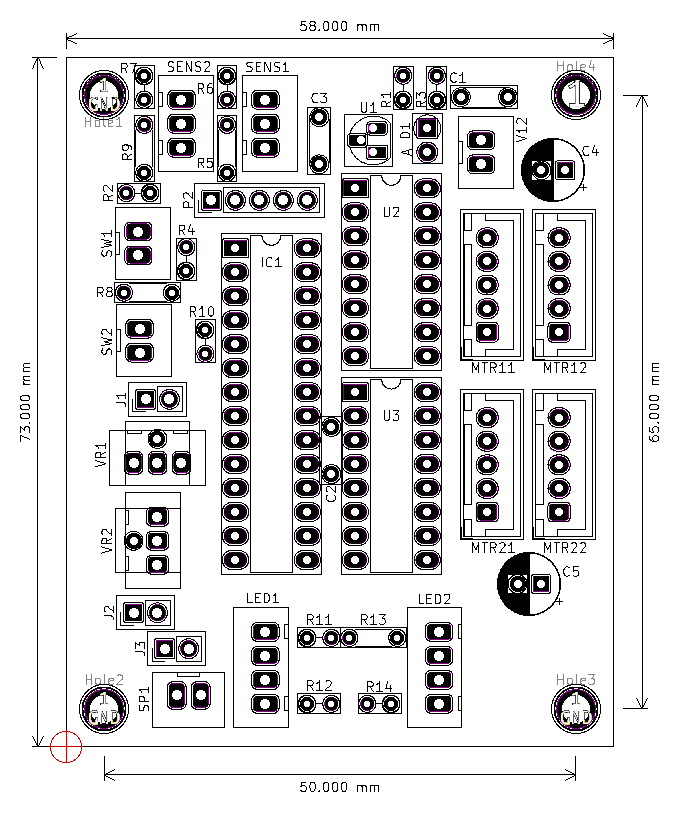
基板サイズは58mm✕73mm、取付穴の間隔は50mm✕65mmです。
回路図、露光マスク、ドリルマップ、部品配置をpdfにまとめたものを添付します。
==>CROSSING_M4_circuit.pdf
露光マスクを印刷する際は印刷用紙に合わせて拡大するモードではなく、実際のサイズで印刷するモードを選択してください。
基板サイズは58mm✕73mm、取付穴の間隔は50mm✕65mmです。
回路図、露光マスク、ドリルマップ、部品配置をpdfにまとめたものを添付します。
==>CROSSING_M4_circuit.pdf
露光マスクを印刷する際は印刷用紙に合わせて拡大するモードではなく、実際のサイズで印刷するモードを選択してください。
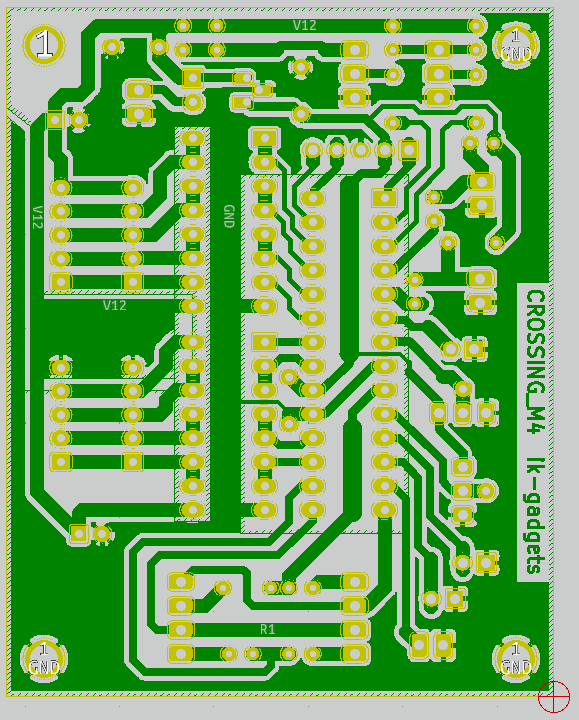
裏面配線
部品配置
露光マスクの穴径はドリルで穴あけするときガイドになるように同一の小径にしてあります。
ドリル径選択はpdfファイルの3ページ目のドリルマップを参照してください。
ドリルマップには7種のドリル径が書かれていますが私は0.8mm、1mm、3.2mmの3種で穴あけしました。
はんだ付けするとき、XHコネクタの向きを間違えやすいので注意してください。
保護ダイオードD1は白い線が入った方 (カソード側) を3端子レギュレータ(U1)に接続します。
部品実装
【CROSSING_M4基板部品表】(2021年10月調べ@秋月電子通商)
| 種類 | 数量 | 秋月通販コード | コメント |
|---|---|---|---|
| PIC16F18456-I/SP (注2) | 1 | I-15206 | DIP28ピンPICマイコン |
| TA78L05S (注1) | 1 | I-08973 | 5V 100mAレギュレータ |
| ULN2003AN | 2 | I-15064 | 5個入りのI-15239もある |
| 1μFセラミックコンデンサ | 3 | P-03093 | 1パック10個入り |
| 100uF16V OSコンデンサ | 2 | P-08290 | 固体電解コンデンサ |
| 1S4 40V 1Aショットキーダイオード | 1 | I-00127 | 10本入りはI-16384 |
| 1KΩ抵抗 | 14 | R-25102 | 1パック100本入り |
| 10KΩ半固定抵抗 | 2 | P-14905 | P-03277も可 |
| XHコネクタ2ピン | 4 | C-12247 | 差し込む側はC-12255+端子C-12264 |
| XHコネクタ3ピン | 2 | C-12248 | 差し込む側はC-12256+端子C-12264 |
| XHコネクタ4ピン | 2 | C-12249 | 配線側はC-12257+端子C-12264 |
| XHコネクタ5ピン | 4 | C-12250 | モーター接続用。型番B7B-XH-A(LF)(SN) |
| ピンヘッダ | 1 | C-00167 | 40ピンを5ピン✕1、2ピン✕3に切断 |
| ジャンパピン | 3 | P-03691 | 音量調整のモードを変更する場合は必要 |
(注1) LP2950L-5から変更しました。
LP2950L-5を使う場合はC3を10μF以上(例:秋月電子 通販コード P-02184)にしてください。
理由の詳細 ==> 緊急報告:電源投入方法依存の故障発生
(注2) PIC16F18855またはPIC16F18857-E/SP,-I/SPも使用可能
PICマイコンプログラミング
PIC16F18456-I/P用 crossing_M4_3.X.production.hex
PIC16F18855-E/SP用 crossing_M4_3_PIC16F18855.X.production.hex
PIC16F18857-I/SP用 crossing_M4_3_PIC16F18857.X.production.hex
PIC16F18855-E/SP用 crossing_M4_3_PIC16F18855.X.production.hex
PIC16F18857-I/SP用 crossing_M4_3_PIC16F18857.X.production.hex
使用するPICマイコンの型番に対応した上記HEXファイルをダウンロード(右クリック-->名前を付けてリンク先を保存)してローカルPCに置きます。
基板に電源を供給し、MPLAB SNAP等のPIC書込みツールをPCと基板に接続します。
MPLAB IPEを起動してconnectボタンを押し、チップの型番とダウンロードしたHEXファイルを指定し
左上[settings]をクリック-->Release from Resetをクリックしてから【注:Hold on Reset解除】
programボタンを押して書き込みます。
書き込みツール等については「PICマイコンと開発ツール」のページやWeb情報を参照してください。
(注) 2022/10/04に機能追加しバージョンアップしました。(crossing_M4 --> crossing_M4_2)
旧バージョンとの違いは以下の通り。
1.ピンヘッダ J1,J2,J3 は警報音関連の設定からモーター回転に関する設定に変更しました。
J1 でモーターの回転方向切り替え、J2 と J3 でモーターの回転速度(遮断棒上げ下げの速さ)を設定します。
2. SW1 に接続されたスイッチを2秒以内に2回押すことで4段階の音量の切り替えができます。
SW2 に接続されたスイッチを2秒以内に2回押すと警報音のON/OFFが切り替わります。
(注) 2022/10/18に警報音改善のためバージョンアップをしました。
ダイナミックスピーカー用です。(crossing_M4_2 --> crossing_M4_3)
詳細は 警報音の改善 に記述しました。
SW1に接続されたスイッチを押しながらSW2のスイッチも押す(同時押しする)と周波数が4種類切り替わります。
秋月電子通商でPIC16F18456-I/Pが買えなくなったため、PIC16F18855-E/SPをマルツオンラインから購入しプログラムを移植して互換品にしました。
(注) 2023/04/09に秋月電子通商で購入可能なPIC16F18857用プログラムを追加しました。
旧バージョンとの違いは以下の通り。
1.ピンヘッダ J1,J2,J3 は警報音関連の設定からモーター回転に関する設定に変更しました。
J1 でモーターの回転方向切り替え、J2 と J3 でモーターの回転速度(遮断棒上げ下げの速さ)を設定します。
2. SW1 に接続されたスイッチを2秒以内に2回押すことで4段階の音量の切り替えができます。
SW2 に接続されたスイッチを2秒以内に2回押すと警報音のON/OFFが切り替わります。
(注) 2022/10/18に警報音改善のためバージョンアップをしました。
ダイナミックスピーカー用です。(crossing_M4_2 --> crossing_M4_3)
詳細は 警報音の改善 に記述しました。
SW1に接続されたスイッチを押しながらSW2のスイッチも押す(同時押しする)と周波数が4種類切り替わります。
秋月電子通商でPIC16F18456-I/Pが買えなくなったため、PIC16F18855-E/SPをマルツオンラインから購入しプログラムを移植して互換品にしました。
(注) 2023/04/09に秋月電子通商で購入可能なPIC16F18857用プログラムを追加しました。
調整と初期設定
【1.遮断棒の振れ幅とモーターのトルク、速度調整】
まず基板と接続しない状態で遮断棒駆動装置裏面のスライダーを左右に離れる方向に手動でゆっくり端まで動かします。
その状態で表面側の各遮断棒が水平になるように裏面の振れ幅調整用M3ネジを回して調整します。
ネジを回すにはスライダーが邪魔なので、手で少しスライダーを戻してM3ネジを回します。
ネジを時計回りに回すと遮断棒があがり、逆に回すと回すと下がります。
少しづつネジを回して調整を繰り返します。
次にスライダーを逆方向に端まで動かし、もう一方のM3ネジを回して遮断棒が垂直になるよう調整します。
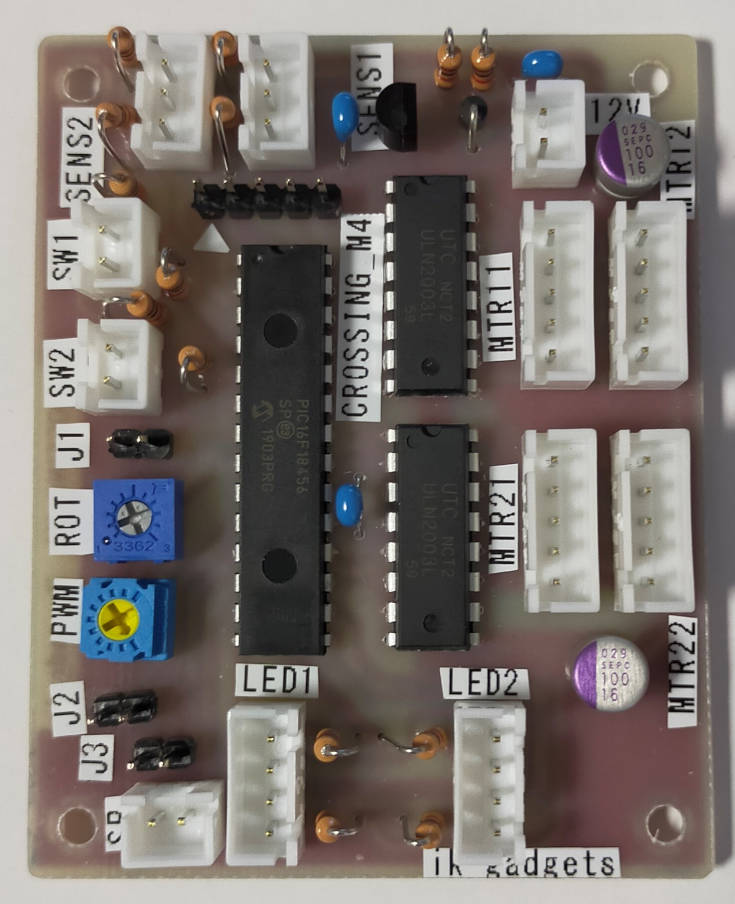
基板の半固定抵抗(VR1、写真でROTのラベル)をドライバーで回しておおよそ中央の位置にします。
基板の半固定抵抗(VR2、写真でPWMのラベル)を端からおおよそ時計回りに180度まわします。
手でスライダーを動かして遮断棒を垂直にしてから基板にモーターとスイッチを接続し電源を入れます。
どちらでも良いので、片方のスイッチをON(導通状態)にするとまず警報灯が点灯します。
さらにONを保持すると4秒後にモーターが動き初め、半固定抵抗(ROT)の設定位置に比例した時間だけ回転して止まります。
スイッチをOFFにすると元の位置に戻ります。
ステッピングモーター28BYJ48は製造時期によって仕様(回転方向)が変わったようなので、もし遮断棒の上げ下げが逆の場合は J1ピンヘッダ にジャンパピンを挿すかどうか(ショート or open)で回転方向の設定を変更してください。
半固定抵抗(ROT)を時計回りに回すとモーターの駆動時間が増加するので、スイッチのON/OFFを繰り返して必要十分な動作角度になるよう調整します。
半固定抵抗(VR2、写真でPWMのラベル)を時計回りに回すとモーターのトルク(電流)が増加し、逆に回すと減少します。
モーターの騒音も同様に増減するので、確実に動く最小値を探して設定してください。
なおモーターのトルクをPWM方式で下げているため、振れ幅調整ネジにアームが当たって回転が止まった後にモーター駆動が少しの間続いても問題ありません。
ピンヘッダJ2、J3にジャンパピンを挿す(short)か、挿さない(open)かでモーターの回転速度(遮断棒の上げ下げ速度)が変わります。
(J2,J3)=(open,open)で低速、(open,short)で中低速、(short,open)で中高速、(short,short)で高速 になります。
【2.警報灯点灯開始から遮断棒降下開始までの遅延時間設定】
どちらか一方のスイッチをONにした後で基板の電源をONにすると警報灯が全点灯します。
その後、スイッチをOFFにすると電源ONからスイッチOFFまでの時間が遮断棒降下開始までの遅延時間として設定されます。
設定値は電源をOFFにしても保持されます。
なお遅延の初期値(プログラム書込み後の値)は4秒です。
【3.警報音の音量調整】
SW1 に接続されたスイッチを2秒間に2回押すと音量が4段階で循環的に変わります。
音量最大 --> 音量1/2 --> 音量1/4--> 音量1/8 --> 音量最大 ・・・
SW2 に接続されたスイッチを2秒間に2回押すと警報音のON/OFFが切り替わります。
音量の設定は記憶され、電源を切っても保持されます。
【4.センサーによる車両検出後の警報継続時間設定】
susukuma鉄道チャンネルとの打合せ結果、踏切設置線路は複線で列車運行方向は固定ということになりました。
その条件でセンサー数は線路あたり1個としました。
センサーによる列車検出で踏切警報を開始し、停止は時間設定で行ないます。
警報継続時間の設定方法は以下の通りです。
まず踏切の遮断棒降下が間に合うような位置にセンサーを設置します。
次に列車を走らせて時間設定を行ないます。
列車下面が黒色でフォトリフレクタによる検出が困難な場合はアルミ箔やメタリックテープを列車の先頭及び最後尾の下面に貼っておきます。
貼りつけ位置は通過時にセンサ―の真上に来る位置で、幅5mmもあれば十分でしょう。
列車を走らせてセンサー上を通過させます。
センサーが列車を検出し踏切の警報が開始されたら、その線路に対応する側のスイッチをONにして保持します。
列車が踏切を通過し終わったらスイッチをOFFにします。
すると列車の最後尾がセンサーを通過してからスイッチがOFFになるまでの時間が警報の継続時間として記憶されます。
この設定を複線のそれぞれの線路で行ないます。
この設定値は電源OFFでも保持されます。
まず基板と接続しない状態で遮断棒駆動装置裏面のスライダーを左右に離れる方向に手動でゆっくり端まで動かします。
その状態で表面側の各遮断棒が水平になるように裏面の振れ幅調整用M3ネジを回して調整します。
ネジを回すにはスライダーが邪魔なので、手で少しスライダーを戻してM3ネジを回します。
ネジを時計回りに回すと遮断棒があがり、逆に回すと回すと下がります。
少しづつネジを回して調整を繰り返します。
次にスライダーを逆方向に端まで動かし、もう一方のM3ネジを回して遮断棒が垂直になるよう調整します。
基板の半固定抵抗(VR1、写真でROTのラベル)をドライバーで回しておおよそ中央の位置にします。
基板の半固定抵抗(VR2、写真でPWMのラベル)を端からおおよそ時計回りに180度まわします。
手でスライダーを動かして遮断棒を垂直にしてから基板にモーターとスイッチを接続し電源を入れます。
どちらでも良いので、片方のスイッチをON(導通状態)にするとまず警報灯が点灯します。
さらにONを保持すると4秒後にモーターが動き初め、半固定抵抗(ROT)の設定位置に比例した時間だけ回転して止まります。
スイッチをOFFにすると元の位置に戻ります。
ステッピングモーター28BYJ48は製造時期によって仕様(回転方向)が変わったようなので、もし遮断棒の上げ下げが逆の場合は J1ピンヘッダ にジャンパピンを挿すかどうか(ショート or open)で回転方向の設定を変更してください。
半固定抵抗(ROT)を時計回りに回すとモーターの駆動時間が増加するので、スイッチのON/OFFを繰り返して必要十分な動作角度になるよう調整します。
半固定抵抗(VR2、写真でPWMのラベル)を時計回りに回すとモーターのトルク(電流)が増加し、逆に回すと減少します。
モーターの騒音も同様に増減するので、確実に動く最小値を探して設定してください。
なおモーターのトルクをPWM方式で下げているため、振れ幅調整ネジにアームが当たって回転が止まった後にモーター駆動が少しの間続いても問題ありません。
ピンヘッダJ2、J3にジャンパピンを挿す(short)か、挿さない(open)かでモーターの回転速度(遮断棒の上げ下げ速度)が変わります。
(J2,J3)=(open,open)で低速、(open,short)で中低速、(short,open)で中高速、(short,short)で高速 になります。
【2.警報灯点灯開始から遮断棒降下開始までの遅延時間設定】
どちらか一方のスイッチをONにした後で基板の電源をONにすると警報灯が全点灯します。
その後、スイッチをOFFにすると電源ONからスイッチOFFまでの時間が遮断棒降下開始までの遅延時間として設定されます。
設定値は電源をOFFにしても保持されます。
なお遅延の初期値(プログラム書込み後の値)は4秒です。
【3.警報音の音量調整】
SW1 に接続されたスイッチを2秒間に2回押すと音量が4段階で循環的に変わります。
音量最大 --> 音量1/2 --> 音量1/4--> 音量1/8 --> 音量最大 ・・・
SW2 に接続されたスイッチを2秒間に2回押すと警報音のON/OFFが切り替わります。
音量の設定は記憶され、電源を切っても保持されます。
【4.センサーによる車両検出後の警報継続時間設定】
susukuma鉄道チャンネルとの打合せ結果、踏切設置線路は複線で列車運行方向は固定ということになりました。
その条件でセンサー数は線路あたり1個としました。
センサーによる列車検出で踏切警報を開始し、停止は時間設定で行ないます。
警報継続時間の設定方法は以下の通りです。
まず踏切の遮断棒降下が間に合うような位置にセンサーを設置します。
次に列車を走らせて時間設定を行ないます。
列車下面が黒色でフォトリフレクタによる検出が困難な場合はアルミ箔やメタリックテープを列車の先頭及び最後尾の下面に貼っておきます。
貼りつけ位置は通過時にセンサ―の真上に来る位置で、幅5mmもあれば十分でしょう。
列車を走らせてセンサー上を通過させます。
センサーが列車を検出し踏切の警報が開始されたら、その線路に対応する側のスイッチをONにして保持します。
列車が踏切を通過し終わったらスイッチをOFFにします。
すると列車の最後尾がセンサーを通過してからスイッチがOFFになるまでの時間が警報の継続時間として記憶されます。
この設定を複線のそれぞれの線路で行ないます。
この設定値は電源OFFでも保持されます。
レイアウトへの組み込み
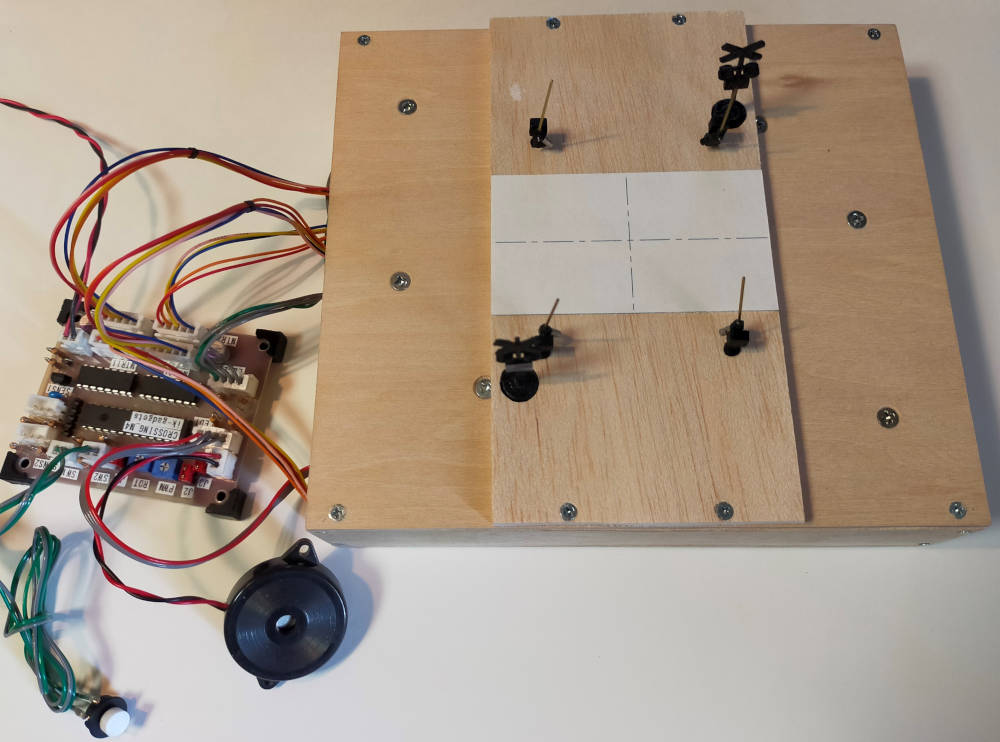
Nゲージレイアウトの台に上記の駆動装置や遮断棒をばらして組込むのは位置合わせや調整が大変になります。
そこでレイアウトの台に穴を開けて箱ごと踏切をはめ込み、その上にレールや道路を載せることになると思われます。
上記の踏切はすでに息子(susukuma鉄道模型チャンネル)へ手渡しました。
今後塗装やレイアウトへの組み込みについての紹介動画が公開されると思います。
そこでレイアウトの台に穴を開けて箱ごと踏切をはめ込み、その上にレールや道路を載せることになると思われます。
上記の踏切はすでに息子(susukuma鉄道模型チャンネル)へ手渡しました。
今後塗装やレイアウトへの組み込みについての紹介動画が公開されると思います。